Перенос идет за счет ветровых потоков с учетом мелкомасштабной флуктуации, имеющей адвективную и конвективную составляющие, которую можно рассматривать как диффузию на фоне осредненного движения согласно розе ветров.
Пусть  – интенсивность (концентрация) мигрирующей аэрозольной субстанции втекающей в контролируемую область.
– интенсивность (концентрация) мигрирующей аэрозольной субстанции втекающей в контролируемую область.
Решение получают в цилиндрической области из уравнения, учитывающего то, что вдоль траектории аэрозольной субстанции сохраняется ее интенсивность

или в развернутом виде
 ,
,
где  – компоненты вектора скорости ветра
– компоненты вектора скорости ветра 
При этом для нижней части атмосферы выполняется закон сохранения массы, т.е. соблюдается условие неразрывности потока:
Таким образом, уравнение переноса примет вид
н.у.  при
при  ; г.у.
; г.у.  на
на  при
при  <0,
<0,
где 
 – заданные функции, а – проекция на нормаль к цилиндрической поверхности /
– заданные функции, а – проекция на нормаль к цилиндрической поверхности /
Начальные условия задают на границе поверхности цилиндрической области, где воздействующие массы втекают в нее при известных .
В случае, если аэрозольная субстанция реагирует со средой или распадается, уравнение переноса примет вид
где  – коэффициент определяющий скорость реагирования субстанции со средой, с – 1.
– коэффициент определяющий скорость реагирования субстанции со средой, с – 1.
При  (нет ветра), концентрация будет изменяться согласно
(нет ветра), концентрация будет изменяться согласно
откуда
 .
.
При наличии источника субстанции, который выбрасывает загрязнения согласно функции  , уравнение переноса примет вид
, уравнение переноса примет вид
н.у. при ; г.у. на при <0.
При заданных начальных условиях эта нестационарная задача имеет одно решение. Решать ее сложно, так как – функция времени.
Если считать, что ,  и (концентрация в точке втекания загрязнения на цилиндрической поверхности) не зависят от времени
и (концентрация в точке втекания загрязнения на цилиндрической поверхности) не зависят от времени  , то уравнение примет стационарный вид
, то уравнение примет стационарный вид

Это уравнение дает частное решение для заданных начальных параметров. Получая одно частное решение за другим для новых параметров, получают ряд решений, которые могут шаг за шагом описать процесс во времени. При этом, осредняя результаты на заданном интервале времени, мы как бы учитываем процесс диффузии субстанции, вызванный флуктуациями входных данных (параметров).
Однако реальные процессы сложнее.
Например, пусть , тогда нестационарная задача примет вид
н.у. при , причем, если не зависит от времени, то решение задачи имеет вид
 ,
,
которое при  переходит в решение соответствующей стационарной задачи
переходит в решение соответствующей стационарной задачи
 т.е.
т.е.  .
.
Эта простая модель не описывает основных особенностей переноса субстанции от источника , так как даже в безветренную погоду загрязнение расплывается из – за мелкомасштабных вихрей турбулентности.
Указанные вихри учитывает уравнение переноса и диффузии вида
 ,
,
н.у. при ,
где  ,а
,а  и
и –горизонтальный и вертикальный коэффициенты диффузии, определяемые экспериментально
–горизонтальный и вертикальный коэффициенты диффузии, определяемые экспериментально
Простейшее диффузное уравнение при отсутствии ветра для залпового выброса загрязнения может быть представлено в виде
 при
при  ,
,
где  – мощность источника;
– мощность источника;  – дельта функция.
– дельта функция.
При наличии ветра уравнение примет вид
Графические решения уравнений в общем виде представлены на рисунке
Перенос и диффузия тяжелых аэрозолей описывается уравнением, учитывающим оседание аэрозолей в воздухе , которое подчиняется закону Стокса

н.у.: при , г.у.: на боковой поверхности цилиндра C=0; на нижнем основании цилиндра  и на верхнем основании
и на верхнем основании  .
.
Это уравнение позволяет определить пылеосаждение на плоскости с площадью меньшей площади основания рассматриваемой цилиндрической поверхности за  при
при  . Для этого его интегрируют по
. Для этого его интегрируют по  в пределах
в пределах  , полагая
, полагая  и
и 
Пошаговое решение этого уравнения имеет качественный вид, представленный на рисунке.

методичні вказівки
до практичних занять і самостійної роботи
з дисципліни
“МОДЕЛЮВАННЯ В ЕЛЕКТРОНІЦІ”
для студентів спеціальності 6.050801
“Мікро- та наноелектроніка”
денної і заочної форм навчання
Методичні вказівки до практичних занять до практичних занять і самостійної роботи з дисципліни “Моделювання в електроніці” для студентів спеціальності 6.050801 “Мікро- та наноелектроніка” денної і заочної форм навчання /Укл.: О.В.Василенко, А.В.Коротун. – Запоріжжя: ЗНТУ, 2014. – 66 с.
Укладачі: О.В.Василенко, канд. техн. наук
А.В.Коротун, канд. фіз.-мат. наук
Відповідальний за випуск: Г.В.Сніжной, канд. фіз.-мат. наук
Затверджено
на засіданні кафедри
“Мікро- та наноелектроніка“
Протокол №3
від 19 лютого 2014 р.
ЗМІСТ
Вступ5
1 Практичне заняття №1 Основні закони та класифікація кіл6
1.1 Класифікація та основні рівняння6
1.2 Контрольні запитання 11
1.3 Індивідуальні завдання 11
2 Практичне заняття №2 Графічні методи аналізу12
2.1 Графічні види аналізу на постійному струмі12
2.1.1 Апроксимація нелінійних характеристик14
2.1.2 Отримання еквівалентної ВАХ15
2.2 Графоаналітичні методи аналізу на змінному струмі16
2.3 Лінеаризація кіл17
2.4 Контрольні запитання 18
2.5 Індивідуальні завдання 18
3 Практичне заняття №3 Аналітичні методи аналізу19
3.1 Перетворення функцій часу для аналізу схем19
3.2 Методи аналізу перехідних процесів20
3.2.1 Класичний метод аналізу перехідних процесів21
3.2.2 Операторний метод24
3.3 Числові методи аналізу перехідних процесів26
3.4 Контрольні запитання 26
3.5 Індивідуальні завдання 26
4 Практичне заняття №4 Топологічні елементи та матриці 27
4.1 Топологічні елементи 27
4.2 Матрично–векторні параметри схеми28
4.3 Топологічні матриці для аналізу електронних кіл28
4.4 Принцип дуальності31
4.5 Контрольні запитання 32
4.6 Індивідуальні завдання 32
5 Практичне заняття №5 Методи формування математичної моделі схеми33
5.1 Методи однорідного координатного базису33
5.1.1 Метод вузлових потенціалів33
5.1.2 Метод контурних струмів34
5.2 Методи неоднорідного координатного базису35
5.2.1 Метод змінних стану35
5.2.2 МВП з розширеним координатним базисом40
5.3 Контрольні запитання 40
5.4 Індивідуальні завдання 40
6 Практичне заняття №6 Аналіз функцій схем41
6.1 Матрично–векторні параметри схеми41
6.2 Функції схеми та способи їхнього подання42
6.2.1 Дослідження функцій схем у частотному діапазоні43
6.2.2 Дослідження функцій схеми у часовій області46
6.2.3 Зв`язок між частотними та передатними характеристиками46
6.3 Стійкість схем47
6.4 Дослідження функцій схем у програмах аналізу48
6.5 Контрольні запитання 49
6.6 Індивідуальні завдання 49
7 Практичне заняття №7 Числові методи для аналізу процесів в електронних схемах50
7.1 Дискретні моделі50
7.2 Розрахунок статичного режиму ключа методом Ньютона52
7.3 Розрахунок перехідного процесу в ключі методом Ейлера55
7.4 Алгоритм симуляції в ECAD56
7.5 Контрольні запитання 58
7.6 Індивідуальні завдання 58
8 Практичне заняття №8 Синтез та оптимізація59
8.1 Показники якості електронних систем59
8.2 Параметрична оптимізація в Micro–Cap 60
8.3 Синтез аналогових фільтрів62
8.4 Контрольні запитання 63
8.5 Індивідуальні завдання 63
РЕКОМЕНДОВАНА ЛІТЕРАТУРА64
Додаток А – Варіанти до індивідуального домашнього завдання_65
ВСТУП
Навчальна дисципліна «Моделювання в електроніці» продовжує фахову підготовку студента і базується на знаннях, отриманих при вивченні дисциплін «Твердотільна електроніка», «Теорія електронних кіл» тощо. Основна мета дисципліни – опанування студентом основними принципами моделювання приладів та пристроїв електроніки на різних рівнях абстракції. Основними завданнями дисципліни є опанування студентом основних методів, алгоритмів та засобів для ефективного математичного моделювання електронних схем.
У результаті вивчення навчальної дисципліни студент повинен
знати:
- структуру, програмне та математичне забезпечення систем ECAD;
- основні моделі та макромоделі приладів і пристроїв;
- способи отримання математичних моделей схем;
- розв’язання рівнянь математичних моделей схем;
- види і методи аналізу електронних схем;
- основні поняття та принципи складання нових моделей.
вміти:
- використовувати програмне забезпечення для моделювання;
- розраховувати параметри моделей електроніки;
- розраховувати та аналізувати характеристики пристроїв;
- визначати напрямки та здійснювати параметричну оптимізацію.
Дані методичні вказівки призначені для практичних занять, в ході яких необхідно освоїти підходи у неавтоматизованому та напівавтоматизованому аналізі електронних кіл (наприклад, матричними методами). Методом аналізу при аналітичному підході традиційно називають етап побудови математичної моделі. У вказівках надані основні алгоритми та формули методів аналізу, визначена область їх застосовності, недоліки та переваги. Окремо розглянуто математичне забезпечення симуляції в програмах автоматизованого моделювання, зокрема, етап оптимізації схем.
Наприкінці матеріалу по кожному практичному заняттю надано контрольні питання та завдання для самостійної роботи. МВ містить також завдання для ІДЗ (індивідуальних домашніх завдань).
1 ПРАКТИЧНЕ ЗАНЯТТЯ №1
«ОСНОВНІ ЗАКОНИ ТА КЛАСИФІКАЦІЯ КІЛ»
1.1 Класифікація та основні рівняння
Аналіз електронних схем (ЕС) моделюванням є ключовою проблемою в ECAD. Витоки автоматизованих методів аналізу – в класичній теорії кіл, [1] це компонентні та топологічні закони (Ома, Кірхгофа), теореми комутації для завдання початкових умов та принцип вибору незалежних змінних для мінімізації математичної моделі схеми (ММС), однак, в ECAD більш широкий клас незалежних змінних: наприклад, напруги перетинів, змінні стану.
Спочатку методи аналізу призначалися для ручного розрахунку схем невеликої розмірності. Розвивалися прямі методи: графоаналітичні, розрахунок параметрів схем за статичними та динамічними характеристиками схем, за емпіричними формулами, або за методом керованого заряду. Із розвитком матричних та матрично-топологічних методів набули поширення лінійні методи аналізу: орієнтованих графів, чотириполюсника, еквівалентних схем, метод вузлових потенціалів, контурних струмів, змінних стану. При переході до поняття багатополюсника, методи аналізу стали узагальненими.
ЕС складаються з пасивних та активних елементів, інтегральних мікросхем. У відповідності до основного методу теорії кіл, реальні елементи представляються зосередженими моделями, які складаються з наступних ідеальних двополюсників: опорів, ємностей, індуктивностей, джерел напруги та струму.
 Рисунок 1.1 – Схема заміщення резистора
Рисунок 1.1 – Схема заміщення резистора
|
Ідеалізовані двополюсники відбивають тільки одну суттєву особливість електромагнітних процесів в елементі-прототипі. Однак, в кожному реальному елементі мають місце паразитні процеси, внаслідок чого їхні схеми заміщення ускладнюються. Чим вище вимагається точність розрахунку, тим більшу кількість факторів необхідно врахувати, тим вища розмірність моделі, однак це ускладнює розрахунок (симуляцію).
Із точки зору теорії кіл задача аналізу зводиться до приведення співвідношень, що описують електромагнітні процеси в елементах в залежності між напругою та струмом на їх полюсах. Якщо струми та напруги на полюсах елементу пов'язані лінійними рівняннями, то коефіцієнти цих рівнянь повністю характеризують поведінку елементів і називаються їхніми параметрами.
Параметри можуть бути постійними величинами або функціями часу. В першому випадку – моделі схеми описуються лінійними диференційними рівняннями (ЛДР) з постійними коефіцієнтами; в другому випадку – ЛДР із змінними коефіцієнтами. Якщо залежності між струмом і напругою нелінійні (схема нелінійна) та описується нелінійними диференційними рівняннями (НДР), а параметри елементів є функціями напруги і струму. Коефіцієнти можуть бути також функціями часу [2].
Наступні три диференційні рівняння (системи рівнянь) описують три типи схем:
 (1.1)
(1.1)
 (1.2)
(1.2)
 (1.3)
(1.3)
Рівняння (1.1) – лінійне, із постійними коефіцієнтами а0, а1 , а2, …, аn – характеризує лінійне коло із постійними параметрами.
Рівняння (1.2) – лінійне, в якому хоча б один з коефіцієнтів (ап–1(t)) є функцією часу (але не залежить від у), являє собою лінійне рівняння із змінними коефіцієнтами і описує лінійну систему із змінними параметрами (параметричну систему).
Рівняння (1.3), один або кілька коефіцієнтів якого, в даному випадку ап–1(y), є функціями у, – є нелінійним диференційним рівнянням та характеризує нелінійне коло.
Важливою властивістю лінійних систем, що випливає з лінійності диференційного рівняння (1.1), яке описує поведінку (струм, напругу) системи, є справедливість принципу незалежності або накладення (суперпозиції) [2]. Суть цього принципу може бути сформульована так: при впливі на лінійну систему декількох зовнішніх сил поведінку системи можна визначати шляхом накладення (суперпозиції) розв`язків, знайдених для кожної з сил окремо. Або: в лінійній системі сума ефектів від різних впливів співпадає з ефектом від їхньої суми. При цьому припускається, що система вільна від початкових запасів енергії. Принцип накладення лежить в основі спектрального і операторного методів аналізу перехідних процесів в лінійних колах, а також методу інтегралу суперпозиції (інтегралу Дюамеля [2]). На підставі принципу суперпозиції, будь-які складні сигнали можна при передачі їх через лінійні системи розкласти на прості, більш зручні для аналізу сигнали, наприклад синусоїдальні (так званий гармонійний аналіз, що є розділом вищої математики, застосовується він в спектральному аналізі електронних кіл).
Теорія диференційних рівнянь із змінними коефіцієнтами (рівняння 1.2) складніша, ніж рівнянь з постійними коефіцієнтами. Навіть при гармонійній правій частині рішення рівнянь порядку вище першого може бути знайдені лише в деяких приватних випадках.
Для нелінійних елементів й кіл (рівняння 1.3) принцип суперпозиції не можна застосовувати. Ця властивість нелінійних систем пов'язана з нелінійністю статичних характеристик (вольт-амперних, вебер-амперних та вольт-фарадних) нелінійних елементів. опір й провідність нелінійного активного опору, як індуктивність нелінійної індуктивності та ємність нелінійної ємності, є нелінійними функціями миттєвого значення струму (напруги) на цих елементах. Отже, при аналізі впливу на нелінійне коло складного сигналу його не можна розкладати на прості складові, необхідно шукати відклик системи на результуючу величину сигналу.
Реальні схеми є нелінійними системами із змінними коефіцієнтами, але для спрощення аналізу приймаються різні припущення, які дозволяють умовно виділити три види схем:
- лінійні схеми з постійними коефіцієнтами (рівняння 1.1);
- параметричні схеми, що описуються ЛДР з змінними коефіцієнтами (рівняння 1.2);
- нелінійні схеми (рівняння 1.3).
ММС складаються на основі компонентних рівнянь, які пов’язуються в систему рівняннями топологічними. Теореми комутації дозволяють визначити початкові умови для розрахунку перехідних процесів.
Компонентні рівняння для реактивних компонентів (в формі для миттєвих значень та в операторній формі):

 (1.4)
(1.4)
Для активного опора компонентне рівняння – це закон Ома:
 ,
,
де  ,
,  .
.
Закони Кірхгофа (топологічні):
І Алгебраїчна сума струмів у вузлі (перетині) дорівнює нулю в будь–який момент часу (закон безперервності потоку).
ІІАлгебраїчна сума напруг в контурі дорівнює сумі е.р.с, діючих в контурі в будь-який момент часу (закон збереження енергії).
Закони (теореми) комутації:
І il(0–)= il(0+)
ІІ uc(0–)= uc (0+)
Тобто, не можуть змінитися миттєво струм через індуктивність та напруга на ємності. Це пов’язано із інерційністю електромагнітних процесів в індуктивності та поляризації діелектрика в конденсаторі.
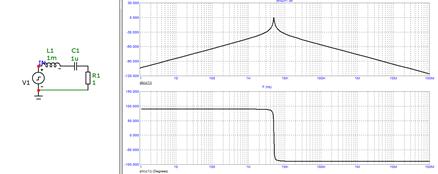
Приклад:Розглянемо етапи створення моделі в пасивному лінійному колі, що працює на змінному струмі, що задає вхідний генератор V1 (рисунок 1.2, а). Математична модель схеми, отримана за 2 законом Кірхгофа, показана нижче в послідовності дій по приведенню її до диференційного рівняння другого порядку:
де f(t) – перша похідна за часом функції вхідного генератора.
Це рівняння математичної моделі схеми (ММС) є неоднорідним, отже рішення його можна знайти лише при гармонійній правій частині та визначених початкових умовах. Якщо параметри цієї схеми не постійні (якщо ємність конденсатор, опір резистора, або індуктивність котушки є функціями часу, або фазових змінних), тобто, якщо ММС параметрична, або нелінійна, розв’язок не може бути знайдений аналітично (у вигляді формули). Частіше за все такі ММС аналізуються в програмах класу ECAD, де рівняння розв’язуються в симуляторах числовими методами інтегрування.
Моделювання частотних перехідних характеристик в ECAD – програмі МС9 наведено відповідно на рисунках 1.2, б і 1.3. При умові завдання частоти сигналу вхідного генератора відповідно до резонансної частоти контуру (у даному прикладі – 5 кГц), на виході починається генерація гармонічного коливання.
а б
а – схема; б – частотні характеристики
Рисунок 1.2 – Дослідження пасивного кола в МС9
Рисунок 1.3 – Дослідження перехідних процесів пасивного кола в МС9
1.2 Контрольні запитання
1 На основі яких елементів формуються схеми заміщення електронних схем?
2 Поняття зосереджених моделей.
3 Основні рівняння в ММС електронних схем.
4 Поняття лінійності систем.
5 Види статичних характеристик.
6 Закони компонентні, топологічні (Кірхгофа), комутації.
7 Моделі пасивних кіл на постійному струмі.
8 Приклад складання моделі пасивного кола на змінному струмі.
1.3 Індивідуальні завдання
1 Пояснити 1 закон комутації.
2 Пояснити 2 закон комутації.
3 Приклади параметричних систем.
4 Умови використання принципу суперпозиції.
5 Умови переходу до комплексної форми компонентних рівнянь.
2 ПРАКТИЧНЕ ЗАНЯТТЯ №2
«ГРАФІЧНІ МЕТОДИ АНАЛІЗУ»
2.1 Графічні види аналізу на постійному струмі
Розрахунок нелінійних ланцюгів постійного струму можна виконати графічно або аналітично. З аналітичних методів розрахунку лінійних схем, що використовуються для аналізу, до нелінійних ланцюгів застосовані наступні: метод двох вузлів; заміна декількох паралельно включених гілок однієї еквівалентною, метод еквівалентного генератора [2].
Хоча до нелінійних електричних й магнітних ланцюгів і можна застосовувати закони Кірхгофа, але такі методи розрахунку, як методи вузлових потенціалів і контурних струмів, а в загальнішому сенсі – методи, засновані на принципі суперпозиції і на постійності параметрів елементів ланцюгів, до нелінійних ланцюгів непридатні.
Опір і провідність нелінійного активного опору, як і індуктивність нелінійної індуктивності і ємність нелінійної ємності є нелінійними функціями миттєвого значення струму (напруги) на цих елементах, тобто є змінними величинами, а тому для розрахунку малопридатні. Замість них використовують вольт-амперні характеристики нелінійних активних опорів, вебер-амперні характеристики нелінійних індуктивностей і кулон-вольтні (вольт-фарадні) характеристики нелінійних ємностей.
Крім того, при аналізі дії на нелінійний ланцюг складного сигналу, його не можна розкладати на простіші сигнали; необхідно шукати відгук системи на результуючу величину вхідного сигналу. Непридатність до нелінійних систем принципу накладення (суперпозиції) робить непридатними спектральний та інші методи аналізу, засновані на розкладанні складного сигналу на складові, наприклад на гармонічні функції (перетворення Фур’є).
З лінійною частиною будь-якого складного розгалуженого ланцюга, доцільно здійснювати будь-які топологічні перетворення, якщо вони полегшують розрахунок усієї складної схеми, наприклад, замінювати паралельне з’єднання гілок із нелінійними елементами однією, що містить нелінійний еквівалентний елемент та джерело напруги, використовувати метод еквівалентного генератора.
Приклад: Визначити струм в гілці аb схеми рис. 2.2 по методу еквівалентного генератора при R1=R0=27 Ом; R2= 108 Ом; R3=81 Ом; R4=54 Ом; E=70 В. ВАХ НО зображена на рис. 2.1.
Рішення. Розмикаємо гілку ab і визначаємо напругу холостого ходу, використовуючи другий закон Кірхгофа: Uabxx=jа–jb=20 В. Для розрахунку вхідного опору Rвх лінійної частини схеми відносно затисків ab необхідно перетворити трикутник опорів R1, R2 R0 (рис. 2.2, б) в еквівалентну зірку (рис. 2.2, в) за формулами:
 Рисунок 2.1 – Визначення робочої точки
Рисунок 2.1 – Визначення робочої точки
|
а б в
Рисунок 2.2 – Топологічні перетворення кола
Для визначення струму в гілці ab проводимо пряму, що проходить через точки U=20 В, I=0 та U=0, I= UabХХ/Rвх= 0,351 А (кут g нахилу цієї прямої до вертикалі з урахуванням масштабів по осях рівний Rвх). Точка перетину цієї прямої з ВАХ НО (точка п) визначає робочий режим схеми. Відповідь: струм І=0,22 А.
2.1.1 Апроксимація нелінійних характеристик
Для аналізу і розрахунку нелінійних ланцюгів потрібно завдання вольт-амперних або інших статичних характеристик нелінійних елементів в аналітичній формі, але реальні характеристики зазвичай мають складний вигляд. Заміна характеристики функцією, що приблизно представляє її, називається апроксимацією характеристики. Вибір оптимальної апроксимації залежить від виду нелінійної характеристики, а також від режиму роботи нелінійного елементу.
При великих амплітудах сигналу часто виявляється зручним замінювати реальну характеристику ламаною, таке представлення називається кусково-лінійною апроксимацією. Слід особливо підкреслити, що заміна реальної нелінійної характеристики лінійними відрізками не означає глобальної лінеаризації ланцюга. Іноді для апроксимації застосовуються різні трансцендентні функції, наприклад гіперболічний тангенс, експоненціальні функції і деякі інші.
Приклад: Апроксимація ВАХ діода. Напівпровідникові діоди використовують як в дискретній, так і в інтегральній схемотехніці. В інтегральних схемах функції діодів зазвичай виконують транзистори в діодному включенні. Застосування дискретних діодів характеризується широким діапазоном перетворюваних сигналів як по потужності, так і по швидкодії, втрати потужності та інерційність сучасних діодів сумісні з аналогічними параметрами керованих приладів – транзисторів, тиристорів [3].
 Рисунок 2.3 – Апроксимація ВАХ діоду
Рисунок 2.3 – Апроксимація ВАХ діоду
|
Для побудови статичної моделі діода, повну ВАХ діода представляють відрізками прямих так, щоб вони якнайкраще (з найбільшою точністю) апроксимували реальну характеристику в заданому режимі експлуатації (у робочому діапазоні струмів і напруги) [3]. Апроксимуючі відрізки прямих можна провести дотичними до реальної характеристики або січними; точність апроксимації вище при введенні січних прямих (рисунок 2.3).
Розділимо реальну ВАХ діода за допомогою прямих на області:
область провідності Uд = Uд0 + Iд rдин;
область відсічення Uд =–Iд rут + Iд0 rут;
область пробою Uд =– Uпроб – Iд проб.
 Рисунок 2.4 – Приватні статичні моделі діоду
Рисунок 2.4 – Приватні статичні моделі діоду
|
Кожній з виділених областей ВАХ можна поставити у відповідність статичні моделі діодів (рис. 2.4). Найбільша погрішність моделей доводиться на області стикування прямих.
2.1.2 Отримання еквівалентної ВАХ
Послідовне з'єднання нелінійних опорів (НО). На рис.2.5,а зображена схема послідовного з'єднання НО із заданою ВАХ лінійного опору R і джерела е.р.с. Е. Необхідно знайти струм в ланцюзі. ВАХ НО позначена на рис.2.5,б як I=f(Uнc), ВАХ лінійного опору - пряма лінія. ВАХ усього ланцюга, тобто залежність струму в ланцюзі від суми падінь напруги на НО і R, позначена через i=f(Uнс+UR). Розрахунок ґрунтується на законах Кірхгофа. Є два способи розрахунку [2]. Перший спосіб ілюструє рис.2.5,б, другий - рис.2.5,в.
  а б в
Рисунок 2.5 – Графічний розрахунок послідовному з'єднанні нелінійних елементів
а б в
Рисунок 2.5 – Графічний розрахунок послідовному з'єднанні нелінійних елементів
|
При розрахунку ланцюга за першим способом будуємо результуючу ВАХ усієї пасивної частини схеми, виходячи з того, що при послідовному з'єднанні через НО і R проходить однаковий струм, тобто при одному значенні функції (струму), додаються аргументи (напруги), тобто відрізок mn додається до відрізку mp, сума – відрізок mq. Точка q належить результуючій ВАХ усієї схеми. Аналогічно будують й інші точки результуючої ВАХ. Визначення струму в ланцюзі при заданій е.р.с. Е виконують графічно за результуючою ВАХ. З цією метою слід задану величину е.р.с. Е відкласти по осі абсцис і через отриману точку провести вертикаль до перетину із результуючою ВАХ в точці q. Ордината точки q дорівнює шуканому струму.
При розрахунку ланцюга за другим способом немає необхідності будувати результуючу ВАХ усієї пасивної частини схеми. Рівняння IR+Uнc=E є рівнянням прямої навантаження, що проходить через точки (I=E/R, U=Uнc=0); (I =0, U=Uнc =E). Тангенс кута її нахилу чисельно рівний R. Точка перетину прямої з ВАХ НО визначає режим роботи ланцюга. При зміні е.р.с. від E до E1, пряму I=f(Ur) слід перемістити паралельно.
Схема паралельного з'єднання двох НО зображена на рисунку 2.6, а; її ВАХ – на рисунку 2.6, б. При побудові результуючої ВАХ виходять з того, що напруги на НО1 і НО2 рівні через їх паралельне з'єднання, а струм в нерозгалуженій частині схеми I1+I2=I. Крива 3 рисунку 2.6, б є ВАХ паралельного з'єднання. Відрізок mq дорівнює струму в нерозгалуженій частині ланцюга при напрузі 0т. Аналогічно визначають інші точки результуючої ВАХ паралельного з'єднання.
 Рисунок 2.6 - Еквівалентна ВАХ
Рисунок 2.6 - Еквівалентна ВАХ
|
2.2 Графоаналітичні методи аналізу на змінному струмі
Якщо нелінійний опір приєднати до генератора синусоїдальної напруги, то струм, що проходить через опір, матиме несинусоїдальну форму, отже нелінійний опір можна вважати генератором вищих гармонік струму. Для того, щоб переконатися в цьому, розглянемо рис.2.7. На ньому крива 1– це ВАХ опору, крива 2 – синусоїдальна напруга на ньому, крива 3 – струм через опір.
 Рисунок 2.7 - Побудова відклику
Рисунок 2.7 - Побудова відклику
|
Для побудови кривої i=f(wt) послідовно надаємо часу t значення, рівні, наприклад, 0, p/6, p/4, p/3, p/2 і т. д.; для кожного з них знаходимо на ВАХ напругу u, переносимо відповідне значення u на криву u=f(i) і з неї визначаємо значення струму i для узятого моменту часу. Знайдене значення струму i відкладаємо у вибраний момент часу.
Ці операції показані на рис. 2.7 стрілками. Так по точках будують криву 3. Вона має пікоподібну форму і може бути розкладена на гармоніки.
Аналогічно, якщо через нелінійний опір пропустити синусоїдальний струм, то напруга на ньому матиме несинусоїдальну форму. Відповідні побудови наведені на рис. 2.8. Отже, нелінійний опір є генератором вищих гармонік напруги. Амплітуди першої і вищих гармонік струму залежать від амплітуд першої і вищих гармонік напруги на нелінійних опорах.
 Рисунок 2.8 – Побудова відклику
Рисунок 2.8 – Побудова відклику
|
Якщо нелінійний опір входить в ланцюг, що містить також реактивні елементи (індуктивність або ємність), то визначення струму при напрузі, що змінюється в часі, є значно складнішим завданням. Ускладнення викликається тим, що струм і напруга в реактивному елементі (індуктивності або ємності) пов'язані між собою диференціальними співвідношеннями, тобто модель схеми буде представляти нелінійне диференціальне рівняння. Інтегрування цього рівняння може бути виконана графічно за допомогою методу ізоклін. Ізокліна є геометричним місцем точок фазової площини, в яких фазові траєкторії мають дотичні з цим (фіксованим) кутовим коефіцієнтом [2].
Гармонійному руху системи відповідає замкнута фазова траєкторія на фазовій площині (еліпс). У загальнішому випадку складного періодичного руху (не обов'язково гармонійного) фазова траєкторія може мати складну форму, але вона обов'язково є замкнутою. У разі автоколивальної системи, що має стійкий стаціонарний стан, на фазовій площині є замкнута крива, до якої із зростанням часу наближаються сусідні фазові траєкторії.
2.3 Лінеаризація кіл
Головною особливістю нелінійного підсилення є залежність основних його параметрів від амплітуди коливання. Проте, при фіксованому значенні амплітуди синусоїдального сигналу схему можна умовно трактувати як лінійну, оскільки амплітуди струмів і напруги в цій схемі пов'язані між собою звичайними лінійними співвідношеннями. Можна, зокрема, скористатися методом комплексних амплітуд [2]. Такий підхід до аналізу нелінійних систем має назву квазілінійного методу, і застосовний в тих випадках, коли незважаючи на нелінійність ланцюга, забезпечується синусоїдальна форма вихідних коливань, причому система розглядається в стаціонарному режимі. Нелінійність системи проявляється в тому, що при зміні амплітуди коливань змінюються і «середні» параметри, всередині одного періоду коливань вони зберігають постійні значення (квазілінійний метод).
Лінійні ланцюги, як правило, працюють у поєднанні з активними елементами: електронними лампами, напівпровідниковими приладами. Характеристики активних елементів в загальному випадку є нелінійними функціями напруги або струму. Тому і системи з активними елементами, є нелінійними системами. Проте при використанні відносно малої ділянки вольт-амперної характеристики активного елементу (при роботі в режимі «малого сигналу», тобто, в режимі підсилення), останній умовно можна розглядати як лінійний елемент.
Приведення схеми лінійного електронного підсилювача до еквівалентних лінійних схем дозволяє застосовувати до них усі положення теорії лінійних пасивних ланцюгів. У ланцюгах з активними елементами принцип взаємності (зміна напряму проходження сигналу не змінює функцію схеми) не виконується, що пояснюється вентильним властивостям таких елементів, завдяки яким збудження підсилювача з боку виходу майже не робить впливу на вхід.
2.4 Контрольні питання
1 Методика графічних методів аналізу кіл на змінному струмі.
2 Апроксимація ВАХ діода.
3 Еквівалентні перетворення кіл при аналізі.
4 Методика отримання еквівалентної ВАХ.
5 Графічні види аналізу на постійному струмі.
6 Графічний аналіз на змінному струмі.
7 Лінеаризація на малому сигналі.
2.5 Індивідуальні завдання
1 Задача – метод двох вузлів.
2 Задача – метод еквівалентного генератора.
3 Задача – послідовне з’єднання нелінійних елементів.
4 Задача – паралельне з’єднання нелінійних елементів.
5 Задача – знаходження реакції на змінному струмі за ВАХ.
3 ПРАКТИЧНЕ ЗАНЯТТЯ №3
«АНАЛІТИЧНІ МЕТОДИ АНАЛІЗУ»
3.1 Перетворення функцій часу для аналізу схем
Особливо важливе значення перетворення функцій часу полягає в тому, що математичні моделі схем можна отримати в формі алгебраїчних рівнянь (із комплексними коефіцієнтами), оскільки при нульових початкових умовах операції диференціювання оригіналу відповідає множення його зображення на р, а операції інтегрування – поділ зображення на р. Змінна р може розглядатися як деякий оператор, що має розмірність сек–1 і трактується як комплексна частота, тоді іммітанси двополюсника приймають загальний вид, незалежно від характеру перетворення. Вони приведені в таблиці 3.1.
Якщо в рівняннях пасивного двополюсника під величинами U і I розуміти зображення U(p) і струму I(p), то одержимо рівняння в операторній формі
U (p) =Z (p)*I(p); I (p) = Y (p)*U(p).
Тут Z (p) і Y (p) – деякі функції оператора р, називані відповідно операторними опором і провідністю.
Ідеальні реактивні елементи можна представити еквівалентними операторними схемами. Початкові умови можна врахувати безпосередньо в операторній схемі, вводячи в неї відповідні джерела напруги і струму, що емулюють початкові умови за теоремами комутації. Пасивний двополюсник описується лінійним алгебраїчним рівнянням, що встановлює залежність між струмом і напругою в зазначеному вище змісті за допомогою операторного іммітанса. Це дозволяє виходити з єдиного рівняння, незалежно від характеру двохполюсного елемента і функцій часу, який описує струми і напруги [4]:
U=ZI, I=YU,
або в загальному виді
Q=WX,
де Q і X – грають відповідно роль напруг і струмів; W – визначає характер величин Q и X (іммітанс).
Таблиця 3.1 – Параметри і рівняння пасивних двополюсників
| Двополюсник
| Параметри
| Z
| Y
| Рівняння
|
| для напруг
| для струму
|
| Опір
| 
| R
| G
| UR = RIR
| IR= GUR
|
| Ємність
| 
| 
| рС
| 
| IC=pCUC
|
| Індуктивність
| 
| pL
| 
| UL = pLIL
| 
|
Замість розкладання складного сигналу на гармонійні складові (спектральний метод, перетворення Фур’є) можна скористатися розбивкою сигналу на досить короткі імпульси, або вейвлети [5].
3.2 Методи аналізу перехідних процесів
Методи аналізу і розрахунку перехідних процесів в нелінійних ланцюгах можуть бути класифіковані:
а) по виду основних операцій, які необхідно виконувати для інтегрування нелінійних диференціальних рівнянь, на графічні (графоаналітичні), аналітичні і числові;
б) за характером величини, для якої робиться розрахунок (розрахунок по миттєвих значеннях струмів і напруги, розрахунок по миттєвих значеннях огинаючих струмів і напруги).
Під графічними (графо-аналітичними) розуміють такі методи, в яких основними операціями при визначенні залежності від часу шуканих струмів і напруги являються графічні побудови, що нерідко супроводжуються і деякими допоміжними числовими підрахунками.
Графічні методи аналізу:
- метод, заснований на графічному підрахунку певного інтеграла;
- метод, заснований на заміні визначеного інтеграла наближеною сумою.
Графічні методи мають наступні переваги перед аналітичними:
а) нема необхідності виражати характеристики нелінійних елементів аналітично, що дозволяє позбавитися від погрішностей, пов'язаних з аналітичним представленням характеристик;
б) простота урахування гістерезису й інших складних нелінійних залежностей.
У свою чергу аналітичні методи також мають перед графічними переваги. З них основним є те, що вони дають можливість отримати рішення в загальному вигляді, а не для якогось одного конкретного поєднання параметрів, що дозволяє з'ясувати особливості процесу при зміні усіх параметрів.
Аналітичними називають такі методи, в яких основною операцією при визначенні залежностей шуканих струмів і напруги від часу є точне (наближене) аналітичне інтегрування диференціальних рівнянь ланцюга шляхом використання аналітичних виразів характеристик нелінійних опорів. Аналітичні методи застосовуються для аналізу працездатності проектованої схеми вручну. Числові методи використовуються для автоматизованого аналізу, зокрема, в ECAD [5-7].
Аналітичні методи:
- метод кусково-лінійної апроксимації;
- метод інтегрованої нелінійної апроксимації;
- класичний метод аналізу;
- операторний метод;
- інтеграла Дюамеля;
- метод амплітуд, які повільно міняються (Ван-дер-Поля).
3.2.1 Класичний метод аналізу перехідних процесів
Розглянемо на прикладі підключення джерела постійної напруги в послідовне RL-коло [2]. Схему показано на рисунку 3.1 при u0(t)=U0. В момент часу t=0 ключ замикається. До комутації струми і напруги у RL-колі дорівнювали нулю, тобто коло знаходилось у стані спокою. Тому початкові умови: iL(0+)= iL(0–)=0. Запишемо рівняння за другим законом Кірхгофа для кола після комутації (при t >0):
u0(t) = uR(t) + uL(t),
де uR(t) , uL(t) – напруги на резисторі та котушці індуктивності.
Виразимо ці напруги через струм iL(t) в контурі:
uR(t) = R iL(t) та  .
.
 Рисунок 3.1 - Схема
Рисунок 3.1 - Схема
|
Тоді отримаємо наступне рівняння:
 .
.
Отримане рівняння є лінійним диференційним рівнянням першого порядку, що відповідає колу з одним реактивним елементом. Диференційне рівняння має постійні коефіцієнти і є неоднорідним (права частина відрізняється від нуля). Розв’язок диференційного рівняння будемо знаходити у вигляді суми
iL(t) = iLв (t) + iLвим(t),
де iLв(t) – загальний розв’язок однорідного рівняння з правою частиною, рівною нулю;
iLвим(t) = iLуст(t) – розв’язок, який визначається як значення шуканої змінної, що встановилось після комутації.
а) Для визначення вільної складової iLв(t) запишемо характеристичне рівняння, яке відповідає отриманому диференційному. Воно матиме вигляд: pL+R=0, а його корінь
 Рисунок 3.2 - Графік власної складової
Рисунок 3.2 - Графік власної складової
|
p1 = – R/ L.
Відповідно до цього вільна складова
де A1 – постійна інтегрування;
τ = L /R – має розмірність часу і називається постійною часу RL–кола. Постійні А1 і τ будуть залежати від структури кола та його параметрів.
На рис. 3.2 наведено приблизний графік власної складової. Власна складова існує під час перехідного процесу і визначає його. Тому за допомогою постійної часу можна оцінити тривалість перехідного процесу. Вважають, що перехідний процес практично закінчується через відрізок часу, що дорівнює (4–5)τ (вільна складова за цей час зменшується до 0,02 від свого початкового значення згідно рис. 3.2). Теоретично перехідний процес відбувається безкінечно довго, оскільки вільна складова асимптотично наближається до нуля.
б) Вимушену складову iLвим(t) будемо визначати як усталене значення струму у колі. У сталому режимі в колі встановиться режим постійного струму, при якому напруга на котушці індуктивності тотожна, тобто для будь-якого моменту часу та дорівнює нулю (відповідно до співвідношення
 при iL(t) = const.
при iL(t) = const.
Тому у сталому режимі постійного струму котушку можна представити коротким замиканням, а всю схему у вигляді рис. 3.3, а.
З представленої схеми визначаємо iLвим(t) = iLуст(t) = U0 / R.


а) б)
а – модель схеми для сталого режиму; б – перехідний процес
Рисунок 3.3 – Моделювання перехідного процесу
Повний перехідний струм дорівнює
 , (3.1)
, (3.1)
в) Постійну складову інтегрування А1 визначаємо з початкових умов iL(0+) = 0.
Після комутації струм у колі описується виразом (3.1). Приймаючи в ньому t = 0 і прирівнюючи отриманий вираз відомому початковому значенню, отримаємо
iL(0+) = А1 +U0 / R = 0, звідси А1 = – U0 / R.
Остаточний розв’язок приймає вигляд:
 (3. 2)
(3. 2)
Графік залежності струму від напруги представлено на рис. 3.3, б. До комутації струм у котушці рівний нулю і з цього ж значення починає змінюватись після комутації. При t = τ ток наростає до 0.63 від сталого значення U0 / R, а при t= 4τ – до 0.98U0 / R. По збігу часу t = (4–5)τ перехідний процес практично завершується і у колі встановлюється постійний струм iLуст(t) = U0 / R.
Напруги на резисторі та котушці індуктивності можна визначити за знайденим струмом iL(t) із використанням відомих співвідношень:

Графіки цих функцій наведено на рис. 3.4.

Рисунок 3.4 – Графіки функцій
Напруга на резисторі uR(t) повторює форму струму, а напруга на індуктивності uС(t) пропорційна похідній від струму в перший момент після комутації, напруга на котушці рівна U0, тобто змінюється стрибком, оскільки до комутації вона дорівнювала нулю. Це не суперечить законам комутації, які виконуються тільки для струмів на індуктивностях і напруг на ємностях.
3.2.2 Операторний метод
При переході від гармонійних струмів і напруги (функцій часу) до комплексних амплітуд їх символічних зображень, інтегро-диференційні рівняння перетворюються на алгебраїчні з комплексними коефіцієнтами [2, 4].
Приклад. У схемі на рисунку 3.4
u(t) = 100е–αt В, де α = 0,5 с–1; R = 2 Ом; L = 4 Гн.
Знайти  та
та  , а також значення
, а також значення  та
та  при t = 1 с.
при t = 1 с.
Відповідно співвідношенню  ,
,
функції e-αt відповідає зображення  .
.
Отже, 


 ;
;  ,
,  .
.
 Рисунок 3.5 – Модель схеми
Рисунок 3.5 – Модель схеми
|
За операторним співвідношенням 
тому  .
.
Напруга на індуктивності
 .
.
Відповідь: при t = 1c  ,
,
 .
.
3.3 Числові методи аналізу перехідних процесів
Числові методи базуються на числових методах розв'язання ДР та систем ДР на етапі симуляції в системах автоматизованого проектування, зокрема явним методом Ейлера першого порядку, якщо буде розглянутий нижче в п.7.3 На етапі моделінгу модель системи (схеми), може бути отримана, наприклад, методом дискретних моделей, вузлових потенціалів, змінних стану і т.п.
Числові методи отримують розв'язок у вигляді таблиць, тобто значень функції в конкретні моменти часу, а не формул – загального розв'язку, як аналітичні методи. Використання для ручного розрахунку методів інтегрування першого порядку збільшує загальну похибку моделювання, оскільки в методах першого порядку найбільша локальна методична похибка, яка, до того ж, залежить від розміру кроку та має здатність накопичуватися від кроку до кроку.
Числові методи розглянуті більш детально в матеріалі заняття №7 та в [6–9].
3.4 Контрольні запитання
- Класифікація методів аналізу.
- Поняття іммітансу.
- Умови використання перетворень функцій часу.
- Методика класичного методу аналізу.
- Інтеграл Дюамеля.
- Перетворення функцій часу.
- Операторний метод.
- Класичний метод аналізу перехідних процесів в нелінійних колах.
3.5 Індивідуальні завдання
- Задача – операторний метод.
- Задача – спектральний метод.
- Задача – класичний метод аналізу перехідних процесів в нелінійних колах.
- Задача – графічний підрахунок визначеного інтеграла.
- Методика графоаналітичних методів.
4 ПРАКТИЧНЕ ЗАНЯТТЯ №4
«ТОПОЛОГІЧНІ ЕЛЕМЕНТИ ТА МАТРИЦІ»
4.1 Топологічні елементи
Електрична схема – умовне графічне зображення (УГЗ) електричного ланцюга. Розрізняють декілька типів електричних схем: структурні, функціональні, принципові, заміщення і т. д. При моделюванні будуємо еквівалентну схему електричного ланцюга. Математичний опис процесів в електричних колах базуються на рівняннях трьох типів: компонентних (складених подібно до закону Ома), топологічних (складених на основі законів Кірхгофа) та законах комутації.
Для топологічного опису схеми використовують поняття направленого графа [4], що будується за наступними правилами: будь-який двополюсник заміщується на лінійний сегмент, що називається гілкою, та має стрілку в тому напрямку, в якому приймається позитивний напрямок струму через цю гілку. Характер сполучення між елементами визначає топологічні (структурні) властивості схеми, для опису яких використовують поняття гілки, вузла й контуру. На відміну від електричних елементів, гілки, вузли та контури називаються топологічними елементами.
Сукупність гілок, пов'язаних з вузлом, яка не утворює контурів, називається деревом графа. Гілки, що не ввійшли в дерево графа, називають головними гілками або хордами. Сукупність хорд може утворити контур, але не можна вказати жоден вузол, до якого підходять тільки хорди. Контур – це замкнений шлях для протікання струму. Для систем незалежних контурів або вузлів можна скласти системи лінійно незалежних рівнянь по законах Кірхгофа. Перетин – це замкнуті лінії, проведені так, щоб будь-яка з них перетинала тільки одну з гілок дерева, а інші гілки, що перетинаються відносилися до хорд. Алгебраїчна сума усіх струмів через перетин дорівнює нулю (I закон Кірхгофа). Перетину надається орієнтація.
Кількість незалежних напруг схеми дорівнює кількості гілок дерева, так як будуть відсутні замкнуті контури. Кількість незалежних струмів схеми дорівнює кількості хорд. Струми всіх гілок дерева можна визначити через струми в хордах. Кількість незалежних рівнянь за I законом Кірхгофа дорівнює кількості хорд, а за II законом – гілок дерева. Визначення числа незалежних вузлів й контурів, та визначення незалежної системи, є основними задачами аналізу топології кіл.
4.2 Матрично-векторні параметри схеми
Будь-яка гілка схеми може бути представлена як композиція пасивного двополюсника із ідеальним джерелом напруги чи струму. Система з p рівнянь (р – кількість гілок) для будь-якої схеми:
……………………….
Запишемо їх в матричному вигляді, називаючи вектори й матрицю у відповідності із конкретним змістом:
 ,
,
де  – вектор напруг гілок;
– вектор напруг гілок;
 – вектор струмів гілок;
– вектор струмів гілок;
 – вектор е.р.с. гілок.
– вектор е.р.с. гілок.
 – матриця опорів гілок (квадратна матриця р–го порядку, де р – кількість гілок).
– матриця опорів гілок (квадратна матриця р–го порядку, де р – кількість гілок).
Запишемо узагальнені рівняння джерел струму й напруг:
Для поняття «гілка напруг»:
 .
.
Для поняття «струмова гілка»:
 .
.
4.3 Топологічні матриці для аналізу електронних кіл
Для отримання рівнянь в аналізованій схемі, напівпровідникові прилади замінюються їхніми еквівалентними схемами, що містять пасивні двополюсники та залежні/незалежні джерела струму/напруги.
Вузли, для яких записується рівняння по другому закону Кірхгофа можуть бути записані як p–q+1 (q – вузол, р – гілка) незалежних рівнянь, тому вони називаються незалежними.
При автоматизованому аналізі схему зручно уявити у вигляді матриці інціденцій Аа розміром q ×р, отриманій по направленому графу, згідно правила: в чарунку вноситься ±1, якщо гілка належить вузлу та 0, якщо гілка не належить вузлу.
I закон Кірхгофа може бути записаний компактно у вигляді:
[Аа ][Jв ]=0.
Матриця перетинів позначається [Па] та формується аналогічно до матриці [A]: якщо гілка j належить перетину i та направлена відповідно, записується одиниця, якщо направлена зустрічно: –1, якщо гілка не належить перетину записується 0 .
 Рисунок 4.1 – Гiлки графу і дерево
Рисунок 4.1 – Гiлки графу і дерево
|
Матриця головних перетинів для схеми (рисунок 4.1):
 , (4.1)
, (4.1)
де гілки f, b, d – утворюють одиничну матрицю,
гілки a, c, e – утворюють підматрицю хорд.
Тобто можна переписати 4.1 у вигляді:
 .
.
Будь-який рядок матриці [П] вказує на сукупність гілок, що перетинаються даним перетином. Будь-який стовпчик матриці [П] вказує на сукупність перетинів, що належать до даної гілки. Перемноживши елементи цього рядка на відповідні елементи вектору струмів та склавши добутки, отримаємо алгебраїчну суму струмів в гілках перетину, що, згідно з I законом Кірхгофа, дорівнює нулю (в матричній формі: [П]×[IВ]=0).
Напруги гілок дерева складають сукупність незалежних вузлових напруг схеми, які є координатним базисом в методі вузлових потенціалів (МВП). Щоб визначити напруги гілок через вузлові напруги, необхідно заздалегідь транспонувати матрицю:
 .
.
Це матричне рівняння відповідає р скалярним рівнянням для напруг гілок.
Для того, щоб компактно записати математичну модель схеми у вигляді єдиного матричного рівняння в методі контурних струмів, вводиться матриця контурів [Г], відповідна направленому графу, для чого будь-якому контуру надається одна з двох можливих орієнтацій (орієнтовані контури). Матриці контурів формується аналогічно до інших топологічних матриць:
1, якщо гілка j входить до контуру i та співнаправлена;
–1, якщо гілка входить д

