Сутність зворотного просторової фотограмметричної зарубки полягає у визначенні елементів зовнішнього орієнтування знімка по
опорним точкам. Способи визначення елементів зовнішнього орієнтування по опорних точкам можна розділити на дві групи:
1. способи, що дозволяють в результаті рішення рівнянь безпосередньо отримати елементи зовнішнього орієнтування - прямі способи;
2. способи, в яких передбачається, що відомі наближені(Попередні) значення елементів зовнішнього орієнтування,а в результаті рішення знаходять поправки до цих значень.
Способи другої групи допускають застосування різних статистичних методів, що має істотне значення, особливо для оцінки надійності і точності визначення елементів зовнішнього орієнтування.
Способи першої групи можна розглядати як джерело надання попередньої інформації про елементи зовнішнього орієнтування.
Способи другої групи засновані на використанні рівняння колінеарності і суть їх полягає в наступному.
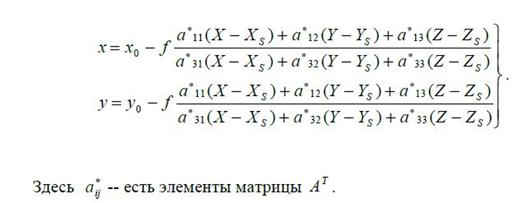
Рівняння колінеарності допомогою лінеаризації приводяться до лінійного вигляду відносно визначав параметрів - елементів зовнішнього орієнтування, тобто отримають рівняння поправок. Далі формується система рівнянь, з вирішення якої, знаходяться поправки до попередніми значеннями невідомих.
Рішення виконується методом послідовних наближень з після-дме оцінкою точності отриманих елементів зовнішнього оріентування. Для визначення елементів зовнішнього орієнтування знімка необхідно мати не менше трьох опорних точок, оскільки, одна точка, виміряна на знімку, буде давати два рівняння. Число невідомих, тобто елементом тобто орієнтування - шість. Цей спосіб застосовний для будь-яких значень елементів зовнішнього орієнтування. Даний спосіб дозволяє при визначенні елементів зовнішнього орієнтування врахувати вплив елементів внутрішнього орієнтування, величини яких у польоті можуть відрізнятися від значень, отриманих в лабораторних умовах. При такому підході для визначення елементів орієнтування (зовнішнього і внутрішнього) потрібно не менше п'яти опорних точок, оскільки, число невідомих становить дев'ять. Слід зазначити, що в разі рівнинній місцевості система рівнянь буде погано обумовлена і точність визначення елементів внутрішнього орієнтування недостатня. У цьому випадку. Зворотній фотограмметрична зарубка застосовується і для вирішення різних не топографічних задач, наприклад, для визначення траєкторії, швидкості і коливань літака, ракети та інших носіїв.

