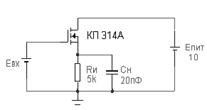
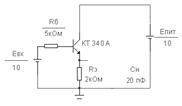
На вході – ідеальна, без фронту сходинка (фронт імпульсу – з 10 В до нуля, або навпаки). Транзистор починає закриватися, ємність навантаження заряджається. Напруга на ній буде змінюватися від 0,31 В майже до Епит.
Визначаємо цю напругу через напругу третього вузла: u3»ucн.
Приймемо що транзистор закрився миттєво (струм через транзистор не йде), тобто весь струм при закритті ключа йде через ємність навантаження, заряджаючи її.
Тоді рівняння для третього вузла прийме вид:
Cн*(d u3/ dt) = aN* Іэ0*(еu2/mjt–1) + (u3–Eпит)/ Rк = 0. (7.7)
Запишемо рівняння метода Ейлера для напруги ucн
ucнi+1= ucнi+h*ducнj/dt,
або
u3i+1= u3i+h*du3j/dt,
де i – номер кроку часу.
Перепишемо рівняння 7.7 з урахуванням того, що
U2≈0 В , або aN* Іэ0*(еu2/mjt–1) →0.
Тоді du3/ dt = (u3–Eпит)/ Rк ·Cн.
Розрахункова формула прийме вид:
u3i+1= u3i+h*(u3–Eпит)/ Rк ·Cн,
Приймаємо крок інтегрування на порядок менший, ніж постійна часу заряду ємності τ = Rк ·Cн=40 нс, h=0.1*(Rк·Cн), та підставляючи числові значення, отримаємо розрахункову формулу:
u3i+1= u3i+0.1*(u3–10).
По ній здійснюємо обчислення uci=u3 на двадцяти-тридцяти часових кроках. Отримані результати занести в таблицю, тут напруга на ємності є вихідною напругою (u3=uвих):
За даними таблиці будуємо графік. Визначаємо час наростання/спадання вихідної напруги.
У програмах симуляції не використовується явний метод Ейлера, внаслідок його маленької області стійкості та низької точності (це метод першого порядку). Для метода Ньютона використовуються спеціальні додаткові алгоритми, які підвищують його збіжність [7].
7.4 Алгоритм симуляції в ECAD
У загальному виді ММС являє собою  систему нелінійних алгебро-диференційних рівнянь [1]:
систему нелінійних алгебро-диференційних рівнянь [1]:
 (7.7)
(7.7)
де Х – вектор координатного базису;
Р – вектор правих частин рівнянь, що включає значення незалежних джерел у даний момент часу;
t – поточний час.
Загальне рівняння ММВП має вид:
 , (7.8)
, (7.8)
де вектор правих частин включає незалежні джерела струму та напруги, струми дискретних моделей реактивних елементів та є «пам’яттю системи»;
Y та Z – відповідно приватні похідні струму по напрузі та напруги по струму, тобто диференційні адмітанси та імпеданси.
Система (7.8) для кожного дискретного моменту часу може бути замінена системою нелінійних алгебраїчних рівнянь:
 . (7.9)
. (7.9)
Заміна рівняння (7.8) на (7.9) називається алгебраїзацією і може бути виконана, якщо замість значення вектора похідних у момент часу tn+1 підставити його значення, що обумовлюється по формулі неявного методу чисельного інтегрування:

де a0, R – коефіцієнти, формули для обчислення яких визначаються застосовуваним неявним методом інтегрування.
Значення a0 та R залежать від величин поточного і попереднього кроків інтегрування, а також значень вектора Х в попередніх дискретних часових точках.
Якщо кожне нелінійне рівняння y = f(x), що входить у ММС, розкласти в околицях точки  в ряд Тейлора:
в ряд Тейлора:
 , (7.10)
, (7.10)
де j та j+1 – індекси поточної і попередньої ітерації;
R(Х) – залишковий член,
а потім підставити в (7.9) замість  вираз (7.10) без залишкового члена, то можна організувати симуляцію ітераційним методом, еквівалентним методу Ньютона, при цьому, на кожній ітерації система нелінійних алгебраїчних рівнянь (7.10) замінюється системою лінійних алгебраїчних рівнянь:
вираз (7.10) без залишкового члена, то можна організувати симуляцію ітераційним методом, еквівалентним методу Ньютона, при цьому, на кожній ітерації система нелінійних алгебраїчних рівнянь (7.10) замінюється системою лінійних алгебраїчних рівнянь:
 , (7.11)
, (7.11)
де  і
і  – матриця системи (Якобі) і вектор правих частини, що залежать від величини поточного часу tn+1 і значення вектора
– матриця системи (Якобі) і вектор правих частини, що залежать від величини поточного часу tn+1 і значення вектора  координатного базису на j–тій ітерації. Ця процедура називається лінеаризацією. Отже, на кожній ітерації ММС може бути зведена до системи лінійних алгебраїчних рівнянь (7.11).
координатного базису на j–тій ітерації. Ця процедура називається лінеаризацією. Отже, на кожній ітерації ММС може бути зведена до системи лінійних алгебраїчних рівнянь (7.11).
7.5 Контрольні запитання
1 Дискретні моделі елементів схеми.
2 Початкові умови, початкове наближення.
3 Метод Ейлера.
4 Метод Ньютона.
5 Лінеаризація/ апроксимація рядом Тейлора.
7.6 Індивідуальні завдання
1 Задача – розрахувати статичний режим методом Ньютона (варіанти – в додатку А).
2 Задача – розрахувати динамічний режим методом Ейлера (варіанти – в додатку А).
3 Метод алгебраїзації – Гіра.
4 Алгоритмічні збої в ECAD.
5 Алгоритми розв’язання диференційних рівнянь в CAS та CAE.
8 ПРАКТИЧНЕ ЗАНЯТТЯ №8 «СИНТЕЗ ТА
ПАРАМЕТРИЧНА ОПТИМІЗАЦІЯ»
8.1 Показники якості електронних систем
Номенклатура показників якості продукції – це сукупність характеристик властивостей продукції, які визначають її якість як продукту виробництва та здатність задовольнити потреби споживача. Групи показників якості [1]:
- показники призначення, які поділяються на підгрупи (характеризують основні властивості продукції, область або спосіб використання: функціональні, конструктивні та експлуатаційні);
- показники надійності. Надійність – властивість виробу зберігати свої функції та експлуатаційні показники в заданих межах на протязі певного часу (безвідмовність, довговічність, здатність до зберігання, ремонтопридатність);
- показники економного використання ресурсів, трудових, в тому числі;
- ергономічні показники;
- естетичні показники;
- показники технологічності (працемісткість, матеріалоємкість, енергоємкість, технологічна собівартість);
- показники транспортабельності;
- показники стандартизації та уніфікації;
- патентно–правові показники;
- показники стійкості до зовнішніх збурень та впливів;
- економічні показники.
Функціональні показники (показники якості) призначення в основному і характеризують рівень якості продукції, тому їх використовують як критерії оптимальності при проектуванні електронних систем (наприклад, швидкодія, смуга пропускання, споживана потужність, масогабаритні показники і т.п.), та є функціями внутрішніх параметрів системи (цільові функції). Якщо оптимізація ведеться за всіма показниками якості – це глобальна векторна оптимізація. Часто один з критеріїв використовують як ведучий, інші переводяться в обмеження, вид яких (лінійні, нелінійні, або дискретні) визначає назву, математику та методику оптимізації (задача лінійного програмування – ЗЛП, нелінійного – ЗНП). Оптимізація по одному критерію із лінійними обмеженнями називається лінійною скалярною локальною оптимізацією.
В програмах автоматизованого проектування можна реалізувати задачу векторної нелінійної параметричної оптимізації; початкове наближення для оптимальних параметрів відшукати за допомогою багатоваріантних видів аналізу, мінімізувати кількість впливових параметрів в цільовій функції методами аналізу чутливості.
8.2 Параметрична оптимізація в Micro–Cap
Задача параметричної оптимізації – відшукання такого набору параметрів схеми, при якому показники якості стають екстремальними. Параметрична оптимізація [1, 7] виконується в програмі Micro–Caр методами Пауелла (Powell) в будь-якому з видів аналізу: аналіз перехідних процесів, малосигнальний АС–аналіз і розрахунок DC характеристик та виконує оптимізацію параметрів компонентів схеми та її моделей по критеріях, вказаних в [7].
При цьому можлива оптимізація по максимальному (Maximizes), мінімальному (Minimizes) або заданому (Equates) значенню вибраного критерію.
Наприклад, в схемі диференційного підсилювача необхідно знайти значення опорів R5 та R2, при яких максимізується підсилення на частоті в 10 кГц. Для цих опорів задаються моделі RMOD та у вікні оптимізатора задається параметр RES RMOD та умови його варіації. Досліджувана схема та результати моделювання (АЧХ), отримані при оптимальному значенні опорів R5 та R2 наведені на рисунку 8.1.
Вікно завдання налагодження параметрів процедури оптимізації (визивається натисканням CTRL+F11) та вікно вибору типу цільової функції та її параметрів наведено нижче (рис.8.2).
У цьому діалоговому вікні вводитися наступна інформація.
Find – вибір параметрів, що оптимізуються;
Low – максимальне значення параметра, що оптимізується;
Step – крок зміни параметра, що оптимізується;
Current – поточне значення параметра, що оптимізується;
Optimized – пошук оптимального значення параметру;
Method – вибір методу оптимізації:
Standard Powell – стандартний метод оптимізації Пауелла,
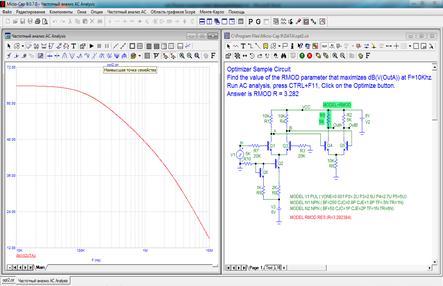
Рисунок 8.1 – Досліджувана схема та її АЧХ
Покроковий Powell (Stepping Powell) – параметри змінюються від значення Low до значення High з кроком Step.
Error – корінь квадратний із сумарної помилки (різниці між цільовою функцією та її фактичною величиною).
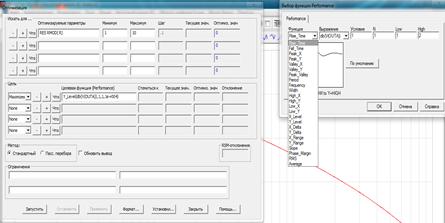
Рисунок 8.2 – Діалогове вікно формування завдання на оптимізацію
Constraints – обмеження типу нерівностей і рівнянь.
Наприклад:
PD(R1)<=100m, V(0ut)>=1.2, VCE(Q1)*IC(Q1)<=200m.
Optimize – початок оптимізації.
Apply – зміна на схемі значення параметрів відповідно до результатів оптимізації.
Format – вибір форми представлення чисел.
Close – завершення режиму оптимізації.
Після заповнення діалогового вікна натисненням на панель Optimize виконують оптимізацію і потім натисканням на панель Apply переносять знайдені оптимальні значення параметрів на схему.
Приведемо методику параметричної оптимізації.
a) Для дослідження пристрою спочатку необхідно створити креслення схему в редакторі схем Circuit Editor.
б) Вибираємо вид аналізу, наприклад, Аналіз – Перехідні процеси… (Alt+1).
в) Попередній пошук напряму для параметричної оптимізації здійснюється багатоваріантними методами, наприклад, Stepping, окремим розрахунком чутливості для визначення складу варійованих/впливаючих параметрів в цільовій функції.
г) Крім безпосередньої оптимізації в MC є можливість проаналізувати схему при випадковому розкиді параметрів елементів. Для цього необхідно виконати розрахунок Monte Carlo.
д) Наступний етап – оптимізація схеми. Оптимізація стає доступною тільки після виконання аналізу (наприклад, Перехідні процеси).
Після виконання аналізу, запускаємо вікно настройки оптимізації. Якщо знайдені значення нас влаштовують, то можна натискати на кнопку Застосувати, і знайдені значення перенесуться на схему.
8.3 Синтез аналогових фільтрів
Програма синтезу аналогових фільтрів Filter Designer дозволяє синтезувати схему пасивного, або активного фільтра за допомогою параметрів форми амплітудно-частотних характеристик, зокрема карти нулів та полюсів; результати синтезу подаються у вигляді макромоделей фільтрів, зокрема у вигляді чорного ящику і можуть бути передані в схемний редактор для подальшого моделювання.
У програмі виробляється апроксимація частотних характеристик ФНЧ, ФВЧ, ПФ і РФ за допомогою поліномів Баттерворта, Чебишева, еліптичних поліномів і поліномів Бесселя. Передбачений синтез фільтрів з амплітудно–частотними характеристиками довільного вигляду та синтез фазових коректорів. Можлива реалізація фільтрів на пасивних LC–колах, активних RC–фільтрів і фільтрів, що переключаються, на конденсаторах, тобто фільтрів, що обробляють дискретні відліки сигналів (тому вони ще мають назву дискретних фільтрів). Максимальний порядок фільтрів дорівнює 32 [7].
8.4 Контрольні запитання
1 Показники якості електронних систем.
2 Параметричний синтез та оптимізація – визначення, ціль.
3 Параметрична оптимізація – методика алгоритму.
4 Параметрична оптимізація – методика користувача.
5 Синтез аналогових фільтрів.
6 Показники якості електронної схеми.
7 Розрахунок коефіцієнтів чутливості.
8 Методика параметричної оптимізації.
8.5 Індивідуальні завдання
1 Синтез моделей.
2 Евристичні методи синтезу/ оптимізації.
3 Автоматизоване проектування ПЛІС.
4 Тенденції розвитку програм ECAD.
5 Історія розвитку програм ECAD.
6 Програми наскрізного проектування.
7 Математичне забезпечення програм конструкторського проектування.
8 Програми CAE.
РЕКОМЕНДОВАНА ЛІТЕРАТУРА
1 Норенков, И.П. Основы автоматизированного проектирования: учеб. для вузов [Текст] /И.П.Норенков. – 4–е изд., перераб. и доп. – М.: Изд–во МГТУ им. Н. Э. Баумана, 2009. – 430 с.
2 Бессонов, Л.А. Теоретические основы электротехники [Текст] /Бессонов Л.А.–М.: Гардарики, 2002.– 638 с.
3 Тугов, Н.Н. Полупроводниковые приборы [Текст] /Н.Н.Тугов, Б.А.Глебов, Н.А.Чарыков – М.: Энергоиздат, 1990 – 676 с.
4 Сигорский, В.П. Основы анализа электронных схем [Текст] /В.П.Сигорский. – К.: Вища школа, 1971. – 567с.
5 Дьяконов, В.П. MATLAB 6/6.1/6.5 + SIMULINK 4/5 в математике и моделировании. Полное руководство пользователя [Текст] /В.П.Дьяков. М.: СОЛОН–Пресс. – 2003. – 576с.
6 Методичні вказівки до лабораторних занять з дисципліни“Моделювання в електроніці” для студентів спеціальності 6.050801 “Мікро- і наноелектроніка” денної і заочної форм навчання [Текст] / Укл.: О.В. Василенко,– Запоріжжя: ЗНТУ, 2011. – 50 с.
7 Micro–Cap 10, Analog and Digital Behavioral Modeling [Електронний ресурс]. – Режим доступу: http://www.spectrum–soft.com/demo/abm.shtm
8 Компьютерный инжиниринг: учеб. пособие [Текст] / А. И. Боровков [и др.]. – СПб.: Изд–во Политехн. ун–та, 2012. – 93 с.
9 ГОСТ 23501.101–87 «Системы автоматизированного проектирования. Основные положения» [Електронний ресурс]. – Режим доступу: http://protect.gost.ru/v.aspx?control=7&id=140533
Додаток А
Варіанти до індивідуального домашнього завдання
| № варіанта
| № схеми
заміщення
| № схеми
| Прилад
|
|
|
|
| малопотужний n–канальний
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| малопотужний n–канальний
|
|
|
|
| малопотужний n–канальний
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| малопотужний n–канальний
|
|
|
|
| малопотужний n–канальний
|
|
|
|
| малопотужний n–канальний
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| малопотужний pnp
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номера схем заміщення
Номера схем
Вопрос 1 (баллы 0 из 1)
Вопрос: Укажите стандарт системы UNIX, разработанный одним из последних (Вес: 1)
| Вправо
| Ваш
| |

|
| |
| POSIX – Portable Operating System (переносимая операционная система. Буквы IX в конце слова были добавлены, чтобы имя проекта выглядело юниксообразно)
|
|
|
|
| |
| SVID – System V Interface Definition (описание интерфейса UNIX System V)
|
|

|
| |
| OSF – Open Software Foundation (Фонд открытого программного обеспечения)
|
|
Вопрос 2 (баллы 0 из 1) [не отвечен]
Вопрос: Укажите множество клонов и версий системы UNIX: (Вес: 1)
Вопрос 3 (баллы 0 из 1) [не отвечен]
Вопрос: Кто является основоположником системы LINUX и в каком году она была выпущена (Вес: 1)
Вопрос 4 (баллы 0 из 1) [не отвечен]
Вопрос: Укажите преимущества LINUX перед другими операционными системами (Вес: 1)
| Вправо
| Ваш
| |
|
|
| |
| Бесплатность, открытый код, высокая степень безопасности и ограничения доступа к ресурсам и данным системы
|
|
|
|
| |
| Большое количество поддерживаемых LINUX аппаратных платформ, графический ин-терфейс с десятками оконных менеджеров, относительно малые требования к аппа-ратным ресурсам
|
|
|
|
| |
| Постоянное быстрое обновление и улучшение, отсутствие зависимости от патентов и лицензий, огромнейшая библиотека документации
|
|
|
|
| |
| Количество и разнообразие прикладного программного обеспечения
|
|
Вопрос 5 (баллы 0 из 1) [не отвечен]
Вопрос: Усовершенствования, которые внесли в разработку операционной системы UNIX исследователи Калифорнийского университета в Беркли, приобретшего UNIX Version 6 практически с момента ее выхода. (Вес: 1)
| Вправо
| Ваш
| |
|
|
| |
| Использование виртуальной памяти и страничную подкачку файлов
|
|
|
|
| |
| Поддержка имен файлов длиной более 14 символов
|
|
|
|
|
|
|
|
| |
| Добавление значительного количества утилит для системы UNIX, включая новый редактор т и новую оболочку csh
|
|
|
|
| |
| Компиляторы языков C++ и Basic
|
|
Вопрос 6 (баллы 0 из 1) [не отвечен]
Вопрос: Кто является основоположником системы MINIX и в каком году ей стали пользоваться в учебных учреждениях (Вес: 1)
Вопрос 7 (баллы 0 из 1) [не отвечен]
Вопрос: Первым компьютером, на который была перенесена с машины PDP-11 операционная система UNIX, был (Вес: 1)
| Вправо
| Ваш
| |
|
|
| |
| Мини-компьютер Interdata 8/32
|
|
|
|
|
|
Вопрос 8 (баллы 0 из 1) [не отвечен]
Вопрос: Система CTSS (Compatible Time Sharing System – совместимая система разде-ления времени) присуща (Вес: 1)
| Вправо
| Ваш
| |
|
|
| |
| Разработкам Массачусетского технологического института
|
|
|
|
| |
| Разработкам Дартмутского колледжа
|
|
|
|
| |
| Калифорнийскому университету в Беркли
|
|
Вопрос 9 (баллы 0 из 1) [не отвечен]
Вопрос: Укажите правильную аббревиатуру MULTICS и ее основных разработчиков (Вес: 1)
| Вправо
| Ваш
| |
|
|
| |
| MULTiplexed Information and Computing Service — мультиплексная информационная и вычислительная служба
|
|
|
|
| |
| MULTiplexed Information and Computing Science — мультиплексная информационная и вычислительная наука
|
|
|
|
| |
| Исследователи Массачусетского технологического института
|
|
|
|
|
|
|
|
| |
| Корпорация General Electric
|
|
|
|
| |
| Исследователи Дартмутского колледжа
|
|
Вопрос 10 (баллы 0 из 1) [не отвечен]
Вопрос: Особенности системы MINIX (Вес: 1)
| Вправо
| Ваш
| |
|
|
| |
| Первая UNIX-подобная система, основанная на схеме микроядра
|
|
|
|
| |
| Первая переносимая система
|
|
Вопрос 11 (баллы 0 из 1) [не отвечен]
Вопрос: Кто из исследователей лаборатории Bell Labs разработал и реализовал переноси-мый компилятор языка С (Вес: 1)
Вопрос 12 (баллы 0 из 1) [не отвечен]
Вопрос: Заслуги Дениса Ритчи и Кена Томпсона в разработке UNIX (Вес: 1)
| Вправо
| Ваш
| |
|
|
| |
| Перенос системы UNIX с машины PDP-7 на более современные компьютеры PDP-11/20, PDP-11/45 и PDP-11/70
|
|
|
|
| |
| Разработка языков В и С, а также компиляторов
|
|
|
|
| |
| Разработка СМ-4 и СМ-1420
|
|
Вопрос 13 (баллы 0 из 1) [не отвечен]
Вопрос: Укажите аббревиатуру UNICS и исследователя, давшего ей такое название (Вес: 1)
| Вправо
| Ваш
| |
|
|
| |
| UNiplexed Information and Computing Service — примитивная информационная и вы-числительная служба
|
|
|
|
| |
| UNiplexed Information and Computing Science – примитивная информационная и вычис-лительная наука
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вопрос 14 (баллы 0 из 1) [не отвечен]
Вопрос: Выберите из приведенного списка современные UNIX-подобные системы (Вес: 1)
Тест № 2. Общая архитектура


 1
1
 2
2
 3
3
 4
4
 5
5
 6
6
 7
7
 8
8
 9
9
 1
1
 2
2
 3
3
 4
4
 5
5
 6
6
 7
7
 8
8