Термоелектричні термометри (термопари) широко застосовуються в системах автоматичного контролю. Принцип дії термоелектричних датчиків заснований на використовуванні термоелектричного ефекту, коли в замкнутому ланцюзі, що складаються з двох різнорідних провідників з двома спаями, виникає ЕРС, якщо температуру спаїв підтримувати різною. Величина ЕРС (термо ЕРС) залежить від матеріалу провідників і різниці температур спаїв.
Ланцюг, з двох різнорідних провідників з двома спаями, називається термопарою. Якщо температуру одного із спаїв підтримувати постійною, то ЕРС, виникаюча в термопарі, буде функцією температури іншого спаю.
Звично в термопарі спай, схильний до дії контрольованої температури, називається гарячим, а інший - холодним (з температурою Т = const ):
Е ав (Т1- Т2) - З = f (T1),
де: Еав - ЕРС термопари.
Для стандартних термопар (мідь - константан, хромель - алюміній й інші) існують таріровочні таблиці і криві.
Низькі температури аж до точки кипіння водню з успіхом вимірюють мідь - константановими термопарами.
Залежність термо - Е.Р.С. від температури для них добре встановлена в межах від -200 до 300 гр. Цельсія.
Як інтерполяційна формула для даного діапазону може служити формула:
Е = Аt + B t2 +С t3,
де: Е - термо - е.р.с. термопари ;
t - температура робочого сплаву;
А, В, С - постійні, визначувані тарування в трьох крапках у вимірюваному діапазоні температур.
Чутливість термопари - відношення приросту термо- е.р.с.D е до відповідного підвищення температури D t.
Вимірювальні термометри
При експлуатації котельних установок вельми важливою проблемою є вимірювання теплового випромінювання, включаючи вимірювання променистої енергії, одержуваної від якого-небудь джерела, і вимірювання радіаційних характеристик матеріалів, виразимих звично у вигляді відношення відображеної, поглиненої або переданої енергії до енергії, що поступила.
Датчики, що вимірюють променисту енергію, називають радіометрами. Найбільше поширення набули фотоелектричні і термічні перетворювачі.
Існує велика гамма вимірювальних термометрів:
· Ядерні магнітні резонансні термометрименш поширені, але перспективні для вимірювання наднизьких температур. Як термочувствітельних елементи в них використовуються високо чисті метали: платина, алюміній, мідь.
· Магнітні термометри -реалізується температурна залежність магнітної сприйнятливості парамагнітних солей.
Термометри ємності - використовується температурна залежність діелектричної проникності матеріалів, яка від температури вище за точку Кюрі підкоряється закону Кюрі - Вейса.
· Тепловізори- перетворять інфрачервоне випромінювання у видиме в реальному масштабі часу при зміні інформації, порівнянної з вживаною в телебаченні.
· Плавкі металеві вставки -ґрунтуються на постійності температур плавлення металів і їх сплави. На цій підставі застосування термо чутливих вставок, конструкція яких вибирається так, щоб плавлення приводило до необоротних і легко помітних змін, наприклад у вигляді трубочки або кільця, закарбовуваних в лунку.
· Термо фарба -суспензія термо чутливих з'єднань, наповнювачів, зв’язуючи і розчинників, яка після нанесення на будь-яку тверду поверхню твердне при висиханні у вигляді тонкої плівки і здатна змінювати свій колір при температурі переходу.
Використовують:
термо лаки, термо пасти, термо олівці, термо таблетки - використовується в електрозапобіжниках, термо порошки.
· Термоконденсатори
Виготовляються з феромагнетиків і сегнетоелектриків і застосовуються при вимірюванні безконтактними методами.
У тих і інших магнітна проникність залежить від температури, проте, для вимірювання температури, наприклад електричної машини, більш зручний сегнетоелектрик, оскільки на його діелектричну проникність не впливає магнітне поле машини.
Залежність діелектричної проникності сегнетоелектрика в пара електричні модифікації від температури вище за точку Кюрі Jс підкоряється закону Кюрі - Вейса. Тому місткість конденсатора, виготовленого з такого матеріалу, визначається формулою:
Кс
 С= ,
С= ,
J - Jс
Де:
Кс - константа;
J - температура.
Для точного вимірювання температури доцільно вибирати матеріали, точка Кюрі яких лежить приблизно на 50 °С нижче мінімальної температури робочого діапазону.
На рис . 1 показана характеристика конденсатора з твердого розчину титаніту стронцію в титаніті барію, точка Кюрі якого приблизно рівна 50 °С.
Константа Кс для цього конденсатора складає 2.5 * 10-3 пФ* град.
Діаметр такого конденсатора рівний 12 мм, висота 1 мм, постійна часу близько 1,5 с. Температурний гістерезис конденсаторів складає приблизно ± 1 °С при температурі 0 °С.
С, пФ

 5000
5000
 1000
1000
0 40 80 120 160 J, °С
Рис. Температурна характеристика керамічного конденсатора з твердого розчину титаніту стронцію в титаніті барію.
При вимірюванні температури з використанням термопари послідовно з вимірювальним спаєм включають компенсаційні спаї, звані іноді холодними (або їх електричні компоненти), які дозволяють одержати струм певного напряму і максимальну е.р.с. вимірювального спаю.
При проведенні точних вимірювань звичайно обидва компенсаційні спаї з мідними висновками тримають при температурі танення льоду. Оскільки зміна температури компенсаційних спаїв, з одного боку, впливає на вихідний сигнал, а з другого боку, застосування ванн з льодом для стабілізації температури цих спаїв незручне, то на практиці звичайно використовують інші методи. Для того, щоб компенсувати помилку, що виникає через зміну температури навколишнього середовища поблизу компенсаційних спаїв, застосовують метод електричного моста з схемою авто компенсації.
У тих випадках, коли можливе тільки візуальне спостереження досліджуваного процесу, для вимірювання температури вдаються до оптичних пірометрів. Діапазон вимірюваних температур в цьому випадку обмежується діапазоном спектральної чутливості використовуваного датчика.
Материал А Си

 Материал В Си
Материал В Си




 Материал А Си +
Материал А Си +
 Материал В Си -
Материал В Си -
Рис. Схеми компенсації холодних спаїв термопар.
При вимірюванні порівнюють випромінювання від опорного джерела , що калібрується, з випромінюванням від досліджуваного процесу; при цьому виробляється вихідний струм, величина якого відповідає температурі досліджуваного процесу.




 Процес
Процес





 -
-











 +
+












 + Io, °С
+ Io, °С
 + - -
+ - -
Рисунок - Автоматичний пірометр
У автоматичних пірометрах це порівняння здійснюється схемою із зворотним зв'язком, в якій використовуються сервомеханізми. Пірометри вимірюють температуру до 5000 °С
Е

 + -
+ -



















 I
I
-
+2,2 мВ/° С
Т
Рисунок - Напівпровідниковий датчик температури
Одним з сучасних методів вимірювання температури є метод, заснований на використовуванні транзистора із зсувом базового переходу в прямому напрямі. У діапазоні робочих температур ± 100 °С погрішність вимірювання цим методом складає 0,1 °С. На практиці в робочому діапазоні температур цих датчиків проводиться найбільше число вимірювань температури. Негативний температурний коефіцієнт падіння напруги на переході базі - емітер біполярного транзистора рівний 2,2 мВ/ °С, і при живленні від стабілізованого джерела струму датчика може бути зроблений дуже стабільним.
Датчики швидкості
Для контролю швидкості обертання частіше усього використовують тахогенератори, що безпосередньо перетворюють швидкість механічного обертання в електричний сигнал ( напруга).
Тахогенератор являє собою малогабаритну електричну машину, яка працює в режимігенератора.
При обертанні ротора тахогенератора його постійний магнітний потік перетинає обмотку статора і индуктирує у ній Е.Р.С. (Е), значення якої визначається таким чином:
Е= 4,44 KwfnФmax=4,44w pvnФмах/60,
де f-частота Е.Р.С.;
p-число пар полюсів обмотки статора;
n- число витків обмотки статора;
Ф мах -амплітудне значення магнітного потоку;
v- швидкість обертання ротора.
У залежності від виду вихідного сигналу тахогенератори діляться на два класи :
- тахогенератори постійного струму;
- тахогенератори перемінного струму.
Перевагою тахогенераторів перемінного струму є відсутністьрухливих електричних контактів (щіток ).
Основні типи тахогенераторов показані схематично на мал.
Ротор синхронного універсального тахогенератора (мал.а), являє собою постійний магніт, поле якого перетинає вихідну обмотку, розміщену на статорі на магнітомагнітного матеріалі.
При обертанні ротора в обмотці индуктируєтся Е.Р.С., амплітуда і частота якої пропорційні швидкості його обертання.

a) синхроний тахогенератор.
На ( мал. б) показана схема тахогенератора постійного струму.
б)
У магнітному полі, утворюваною обмоткою збудження ОЗ, обертається якір з обмоткою, сполученої з колектором.
Напруга між щітками пропорційна швидкості обертання якоря. Щоб послабити залежність вихідного сигналу від розміру струму збудження система такого тахогенератора виконується насиченою. Магнітне поле може також створюватися за допомогою постійних магнітів. При цьому температурна похибка тахогенератора утворюється меншою.
Загальним недоліком тахогенераторів постійного струму є високий рівень шумів, а також пульсації вихідної напруги.
Ротор асинхронного тахогенератора, показаного на (мал.в), виконаний у виді полого провідного циліндра. До обмотки статора W1

в) асинхроний тахогенератор.
підведена змінна напруга живлення U1, а вихідна обмотка W2 розташована під кутом 90 град. до обмотки W1. При обертанні ротора в полі, утворюваного обмоткою W1, у ньому индуктуються вихрові струми у свою чергу що индуктирують е.д.с. в обмотці W2.
У асинхронних тахогенераторів частота вихідного сигналу, на відміну від синхронного тахогенератора, не залежать від швидкості обертання ротора і дорівнює частоті живленої напруги U1.
Амплітуда вихідного сигналу при постійній частоті й амплітуді живленої напруги, пропорційна швидкості обертання ротора.
При зміні напрямку обертання ротора фаза вихідного сигналу змінюється на 180 град. Точність і чутливість асинхронних тахогенераторів ростуть з підвищенням частоти живленої напруги. Недоліками їх є мала потужність вихідного сигналу і залежність його від якості живлення мережі.
Двигуни постійного струму
Машина постійного струму складається з нерухомої частини - статора і частини , що обертається, - ротора, розділених повітряним зазором.
Статор складається із станини, головних і додаткових полюсів.
Станина машини постійного струму служить для кріплення полюсів і підшипникових щитів і є частиною магнітопровода, оскільки через неї замикається магнітний потік машини.
Магнітне поле в машині створюється силою обмотки збудження, що намагнічує, виконуваної у вигляді полюсних котушок, надітих на сердечники головних полюсів.
Якір машини постійного струму складається з валу, сердечника, обмотки і колектора.
У системах управління, як виконавчі пристрої, часто застосовуються двигуни постійного струму.
Управління двигуном постійного струму виробляється шляхом зміни напруги Uя, прикладеної до ланцюга якоря, при незмінному потоці збудження або шляхом зміни потоку збудження при незмінній напрузі Uя,прикладеному до ланцюга якоря.
З теорії електричних машин відомо, що струм в ланцюзі якоря iя, потік збудження Фв, обертаючий момент Мвр, швидкість обертання валу двигуна W і проти електрорухома сила еп, що наводиться в обмотці якоря, в сталому русі зв'язані наступними залежностями:
е п = С е Фв W,
Mвр=Сm Фв iя ,
(1)
Uя= iяRя+ е п,
де: -8
рN 10
 С е = ,
С е = ,
2 pa
Cе
 Cm= .
Cm= .
9,81
Тут: N - число провідників якоря;
а - число пар паралельних гілок ;
р - число пар полюсів;
Rя – активний опір ланцюга якоря.
Виключаючи з рівняння (1 ) еп і iя одержимо
Сm Се Сm 2

 Мвр = Фв Uя- Фв W . (2 )
Мвр = Фв Uя- Фв W . (2 )
Кя Rя
Ця формула визначає механічну характеристику двигуна постійного струму.
При управлінні шляхом зміни напруги, прикладеної до ланцюга якоря, струм збудження Фв постійний, а управляючим вхідним сигналом є Uя. В цьому випадку, як видно з (2), обертаючий момент двигуна лінійно пов'язаний з управляючим сигналом. Це дозволяє плавно змінювати швидкість двигуна в широкому діапазоні.
При управлінні шляхом зміни потоку збудження Uя= const, а управляючим сигналом є Фв. В цьому випадку обертаючий момент нелінійно залежить від управляючого сигналу.
Проте практично при управлінні двигуном за допомогою потоку збудження передбачаються заходи (у ланцюг якоря включається додатковий опір), забезпечуючи незалежність струму в якірному ланцюзі від кутової швидкості вала W. Тому в цьому випадку можна нехтувати другим доданкам в правій частині формули (2) і прийняти лінійну залежність обертаючого моменту від управляючого потоку:
Сm
 Мвр » Фя Uя.
Мвр » Фя Uя.
Rя
Для визначення динамічних характеристик двигуна складемо рівняння руху ротора двигуна: .
J W = Мвр -Ст W - Мс, ( 3 )
де : J - момент інерції всіх мас, що обертаються, приведений до ротора
двигуна,
Ст - коефіцієнт в'язкого тертя,
Мс - момент опору .
Підставляючи в рівняння (3) вираз обертаючого моменту (2) одержимо:
. Се С m 2 Cm

 J W + ( Cт + Фв ) W = Ф в Uя - М с. (4)
J W + ( Cт + Фв ) W = Ф в Uя - М с. (4)
R я Rя
Вихідною величиною може бути або кутова швидкість валу W, або кут повороту ротора двигуна а, визначуваний кінематичним рівнянням:
a =W.
При управлінні першим способом вхідним сигналом двигуна є напруга Uя. В цьому випадку рівняння ( 4 ) може бути приведене у вигляді :
(Т 1 D +1) W = K1 Uя - Kc Мс, (5 )
де:
J Rя Cm Фв Rя

 Т1= , K1 = , Kc= .
Т1= , K1 = , Kc= .
2 2 2
RяСт + СеСmФв RяСт + СеСmФв RяСт + СеСmФв
При управлінні другим способом вхідним сигналом двигуна є напруга
Uя, прикладена до обмотки збудження.
Управляючий потік Ф в і управляюча напруга U в зв'язані рівняннями:
L в i в d i в
 Фв = , Uв = i в R в +Lв .
Фв = , Uв = i в R в +Lв .
wв dt
Виключаючи з попередніх рівнянь Фв, i в, Мвр і рахуючи Мс = const одержимо:
( Т2 D +1 ) ( TвD +1 ) W =K2U в- K M M c, (6)
J Lв Cm Uя Lя 1


 де: Т2 = , Тв = , K2 = , Kм = .
де: Т2 = , Тв = , K2 = , Kм = .
Cт Rв wв Cт R я Rв Ст
Рівняння (5) і (6) написані для випадку, коли вихідним сигналом двигуна є кутова швидкість W. З цих рівнянь виходить, що двигун постійного струму з незалежним збудженням є лінійною динамічною системою.
Порівняння динамічних характеристик двигуна при першому і другому способах управління дозволяє зробити висновок, що швидкодія двигуна при управлінні зміною потоку збудження менше, ніж при управлінні зміною напруги на якорі. Це пояснюється тим, що при управлінні другим способом на швидкодію двигуна робить вплив не тільки електромеханічна постійна часу Т2, але і постійна часу ланцюга збудження Тв. По-друге, електромагнітна постійна двигуна при другому способі управління, більше, ніж при першому способі.
Пристрій асинхронних машин. Основні типи двигунів.
Асинхронні двигуни підрозділяються на два основні типи: з короткозамкнутим і фазним ротором (останні називають двигунами з контактними кільцями). Дані двигуни мають однакову конструкцію статора і відрізняються лише виконанням ротора.
Двигуни з короткозамкнутим ротором є найпоширенішими електропромисловість випускає їх десятками мільйонів в рік.
Наприклад, загальний вид асинхронного двигуна з короткозамкнутим ротором закритого виконання, що обдувається. На статорі розташована трифазна обмотка. Обмотка ротора виконана у вигляді білячої клітки, тобто Є короткозамкнутою.
Конструкція оболонки значною мірою залежить від виконання машини по ступеню захищеності і від вибраної системи охолоджування. У даній конструкції корпус машини для кращого охолоджування забезпечений ребрами. Відцентровий вентилятор, розташований на валу двигуна зовні оболонки машини, обдуває ребристий корпус двигуна. Вентилятор закритий повітря - направляючим кожухом.
Усередині машини повітря перемішується вентиляційними лопатнями, відлитими разом з коротко замикаючими кільцями. На корпусі кріпиться коробка висновків, в якій встановлена клемна панель з виведеними кінцями обмотки статора.
У могутніших двигунах для підвищення інтенсивності охолоджування повітря проганяється через аксіальні канали ротора окремим вентилятором або тим же вентилятором, який обдуває зовнішню поверхню машини. Для цієї мети при використовуванні одного загального вентилятора в аксіальні отвори ротора вставляють повітря - провідні трубки, укріплені в отворах опорних дисків, насаджених на вал ротора. Цим запобігає можливість проникнення до обмоток машини зовнішнього повітря, в якому міститься волога. Щити торців мають жалюзі для проходу і виходу назовні повітря.
Сердечник статора набирається з відштампованих кільце образних листів електротехнічної сталі завтовшки 0,35… 0,5 мм. У листах виштамповують пази для розміщення обмотки. У крупних машинах статор збирається з листів у вигляді сегментів. На листи з обох боків наноситься ізоляція. Листи в пакеті сердечника скріпляються дужками, зваркою або в крупних машинах шпильками. У машинах понад 400 кВт в сердечниках для кращого охолоджування звичайно є радіальні канали. Вони утворюються шляхом розділення сердечника по довжині на ряд пакетів і установкою між ними сталевих дистанційних прокладок, які приварюються до крайніх листів пакету.
У пази магнітопровода статора укладається обмотка, виготовлена з прямокутного або круглого дроту. Обмотки з прямокутного дроту виготовляють у вигляді жорстких секцій і укладають у відкриті або напіввідкриті пази. Обмотки з круглого дроту всипають звичайно в пази, що напівзакривають, через шліц в пазу за допомогою спеціальних статорообмоточних верстатів. У високовольтних машинах корпусну ізоляцію котушок звичайно виконують у вигляді спресованої гільзи.
У сучасних асинхронних машинах використовують електроізоляційні матеріали класів нагревостійкості B і F,а для спеціальних машин, що працюють в тяжких умовах, - матеріали класу H .
У машинах розрізняють межвіткову і корпусну ізоляцію. Межвіткова ізоляція забезпечується ізоляцією самого провідника, що наноситься на нього в процесі виготовлення на кабельних заводах або при виготовленні електричної машини. Корпусна ізоляція відділяє провідники обмотки від корпусу електричної машини. Для неї використовують різні прокладки, гільзи або ряд шарів ізоляції, що наноситься на відповідну котушку до установки її в машину.
Ротор машини складається з пакету листів електротехнічної сталі з виштамповані пазами. У короткозамкнутих роторах пази заливаються алюмінієм, при цьому утворюються стрижні білячої клітки. Одночасно віділлють короткозамикачі кільця торців і вентиляційні лопаті. У крупніших і спеціальних машинах в пази ротора вставляються мідні стрижні, кінці яких упаюються в короткозамикачі мідні кільця. Пакет з алюмінієвою кліткою напрасовується на вал. Для роторів з мідною кліткою листи збираються безпосередньо на валу, а вже потім в пази пакету вставляються мідні стрижні.
Ротори двигунів обертаються в підшипниках, як правішало, застосовуються підшипники качання, в машинах понад 1000 кВт використовуються також підшипники ковзання. У разі потреби на валу встановлюється вентилятор. Підшипники закріплюються в підшипникових щитах, підшипникові щити кріпляться до корпусу статора.
Двигуни з фазним ротором знаходять значно менше застосування, ніж з короткозамкнутим ротором, і випускаються промисловістю головним чином у вигляді машин потужністю понад 100 кВт.
Наприклад, асинхронний двигун з фазним ротором захищеного виконання. Для кращого охолоджування магнітопровода статора і ротора в машинах великої і середньої потужності розділені на окремі пакети, між якими є вентиляційні канали. Вентиляційні лопаті, укріплені на лобових частинах жорстких секцій обмотки, засмоктують повітря в машину через отвори в щитах і викидають його через отвори в корпусі. Така вентиляція називається симетричною радіальною. Контактні кільця розташовані поза оболонкою машини, вивідні кінці обмотки ротора проходять через отвір у валу і підключаються до контактних кілець болтами. Щіткотримачі з щітками прикріпляються щітковою траверсою до щита.
У двигунах з фазним ротором в пази ротора укладають всипну обмотку з круглого дроту або обмотку, що складається з жорстких секцій, що укладаються у відкриті пази ротора, або ж обмотку із стрижнів, що вкладаються в пази, що напівзакривають, з торця. Три кінці від фазних обмоток приєднуються до контактних кілець, встановлених на вал двигуна.
Асинхронний тахогенератор
Принцип дії.Конструкція асинхронного тахогенератора аналогічна конструкції виконавчого асинхронного двигуна з порожнистим немагнітним ротором. На статорі в пазах укладені дві обмотки, зсунуті в просторі на 90. Одна з обмоток В (збудження) постійно включена в мережу, інша обмотка Г (генераторна) приєднана до навантаження Zн, тобто є вихідною.
По обмотці В проходить змінний струм, внаслідок чого створюється магнітний потік Фd, пульсуючий з частотою мережі f1.Этот потік розподілений в просторі практично синусоїдально і його вісь співпадає з віссю обмотки збудження В (мал. 7.12,а), званою подовжньою віссю d-d . Відповідно потік, створюваний обмоткою збудження, називають
Поперечної. Розглянемо, які ЕРС і струми виникають в асинхронному тахогенераторе при нерухомому і обертається роторі.
При нерухомому роторі магнітний потік Фd пронизує обмотку збудження. В, індукція в ній ЕРС
ЕВ = 4,44F1 WB KОБ.В Фdm
Де WB, kоб.в - число витків і обмотувальний коефіцієнт обмотки збудження.
Нехтуючи активним опором обмотки збудження і індуктивним опором, обумовленим потоком розсіяння, для обмотки збудження можна записати UВ+ЕВ=0.
У ідеальному випадку в обмотці Г подовжній потік Фd не індукує ЕРС, оскільки обмотка Г зсунута щодо обмотки В на 90°. Отже, при п=0 і напруга на навантаженні рівна нулю. Проте практично точної магнітної симетрії осей вказаних обмоток досягти неможливо, тому частина потоку Фd виявляється трансформаторний пов'язаною з обмоткою Г і індукує в ній деяку ЕРС, звану залишковою.
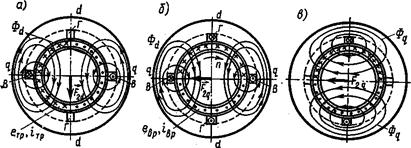
Мал. 7.12. Характер розподілу ЕРС і струмів, індукованих в порожнистому роторі
Порожнистий ротор можна представити сукупністю ряду «елементарних провідників». У кожному такому провіднику пульсуючий потік індукує ЕРС етр, звану трансформаторною. Оскільки активний опір порожнистого ротора у багато разів більше індуктивного, то ЕРС етр і що викликається нею в роторі струм iтр практично співпадають по фазі. При цій умові створювана струмом iтр МРС ротора F2d діє по подовжній осі машини при нерухомому і обертається роторі. На мал. 7.12, а показаний напрям ЕРС етр, струму iтр і МРС F2d у момент часу, коли потік Фd зменшується. Оскільки для обмотки збудження справедлива умова UВ+ЕВ=0, то при виникненні подовжньої МРС ротора F2d в обмотці збудження з'являється компенсуючий струм (аналогічно тому, як в трансформаторі), МРС Fbd якого компенсує дія МРС F2d .
При обертанні ротора яким-небудь стороннім механізмом в його елементарних провідниках крім трансформаторної ЕРС етр індукується ще і ЕРС обертання еВр=Bx l2 v2, де Bx - індукція в даній точці повітряного зазору в дану мить ; l2- довжина ротора в магнітному полі; v2- окружна швидкість ротора.
Оскільки потік Фd пульсує в часі з частотою мережі f1, то і Індуковані їм ЕРС евр також пульсують з цією ж частотою. При синусоїдальному розподілі індукції Вх уздовж кола ротора максимальне значення ЕРС евр у будь-який момент часу досягається в елементарному провіднику, розташованому по продольній осі машини.
На мал. 7.12,6 показані миттєві напрями ЕРС обертання евр і створюваних нею торсів iвр в елементарних провідниках порожнистого ротора.
Слідує підкреслити, що при будь-якій частоті обертання напрям цієї ЕРС в елементах ротора, розташованих по обидві сторони поперечної осі,
протилежне. Якщо нехтувати індуктивним опором порожнистого ротора, то напрям струму iвр в кожному елементі співпадає з напрямом ЕРС евр. При цій умові струми ротора iвр співпадають МРС F2q і пульсуючий магнітний потік Фq, які направлені по поперечній осі q-q(мал. 7.12, в). Потік Фq не зчеплений безпосередньо з обмоткою збудження; у вихідний
обмотці Г він індукує
ЕГ = 4,44f1 WГ kОБ.Г Фdm
Где WГ , kОБ.Г —число витків і обмотувальний коефіцієнт вихідної обмотки.
Частота зміни ЕРС у вихідній обмотці не залежить від частоти обертання ротора і за будь-яких умов рівна частоті зміни ЕДС евр в роторі, тобто частоті мережі f1 живлячої обмотку збудження. Незмінність частоти вихідної напруги є цінною властивістю асинхронного тахогенератора.
Розглянемо, як зв'язана ЕРС ЕГ у вихідній обмотці з частотою обертання ротора. Згідно (7.7), вона пропорційна поперечному потоку
Фdm= F2q/Rmq,
де F2q- максимальне значення МРС ротора по поперечній осі;
Rmq - магнітний опір машини по цій осі.
У асинхронній машині з порожнистим немагнітним ротором ефективний повітряний зазор дуже великий, тому магнітний опір Rmq є практично незмінним (магнітний опір сталевих ділянок нехтує мало). Отже, магнітний потік по поперечній осі практично пропорційний МРС Fmq, яка, у свою чергу, пропорційна струму iвр і ЕРС обертання евр ротора. Проте ЕРС обертання прямо пропорційна потоку Фd і частоті обертання ротора п2 тому за відсутності насичення магнітної системи
Uвих =ЕГ=c1f1Фqm v2=c3n2 ,
Де с1…с3 - постійні.
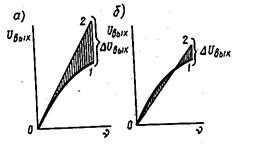
Таким чином, в тому, що ідеалізується тахогенераторе (при прийнятих допущеннях) ЕРС у вихідній обмотці прямо пропорційна частоті обертання ротора. Іншими словами, його вихідна характеристика Uвих= f (v) є лінійною (мал. 7.13,а,кривая 2). У реальних умовах роботи тахогенератора вказана характеристика відхиляється від лінійної залежності (крива 1), тобто з'являється амплітудна погрішність UВиХ .
Амплітудну погрішність можна зменшити шляхом відповідного калібрування тахогенератора. Під калібруванням розуміється встановлення такого нахилу ідеальної характеристики тахогенератора (мал. 7.13,б, крива 2), при якому відхилення в середньому від реальної характеристики 1 мінімальне.
Тахогенератори постійного струму
Служать для вимірювання частоти обертання по величині вихідної напруги, а також отримання електричних сигналів, пропорційних частоті обертання валу в схемах автоматичного регулювання.
Тахогенератор є генератором малої потужності з електромагнітним незалежним збудженням або збудженням постійними магнітами. Ввід того що при постійній величині струму збудження Iв = соnst магнітний потік Ф практично не залежить від навантаження, вихідна Е.Р.С. тахогенератора прямо пропорційна частоті обертання :
1 Е вих = СеФ n = Се n, (1 )
де Се = Се при Ф = соnst.
Вираз (1) справедливий і для тахогенератора із збудженням постійними магнітами, де Ф= соnst.
Для вимірювання частоти обертання тахогенератором вал останнього механічно сполучають з валом механізму, частоту якого вимагається зміряти. На виводи тахогенератора підключають вимірювальний прилад з шкалою, градуйованою в одиницях частоти обертання ( об / хв).
Вихідна характеристика практично не прямолінійна. Основні причини порушення лінійної залежності U вих= f ( n ) - це реакція якоря і падіння напруги в щітковому контакті. Відхилення складає 0,5 - 3 %.
Елементи дистанційних передач
Система дистанційної передачі показаників звичайно містить у собі три елементи: датчик (перетворювач); провідну лінію зв'язку; приймач.
Приймач перетворить сигнал від датчика в переміщення вказівного, що сигналізує або регулює орган.
Прикладами систем дистанційної передачі показань можуть служити:
-сельсини; -ферродинамічна система.
Сельсина система дистанційної передачі містить два однакових елементи - сельсин - датчик (СД) і сельсин -приймач (СП).
Ця система служить для передачі кутів повороту або лінійних переміщень.
Сельсин звичайно являє собою малогабаритну електричну машину з трьома роторними обмотками й одною обмоткою збудження, яка розміщується на статорі. Роторні обмотки розміщаються зі здвигом у просторі на кут 120 град. і з'єднуються в зірку, створюючи одну роторну синхронізуючу обмотку. Підвід струму до роторної обмотки здійснюється через контактні кільця.
Сельсинаминазиваються спеціальні електричні машини змінного струму, які залежно від того, які включені їх і роторних обмотки статорів, можуть працювати як датчики або як елементи дистанційної передачі.
Датчиками є сельсини, працюючі в трансформаторному режимі. У дистанційних передачах використовуються сельсини, працюючі в індикаторному режимі. Крім того, існують так звані диференціальні сельсини, які застосовуються як в сельсинних датчиках, так і в дистанційних передачах.
Відповідно для дистанційної передачі кутів повороту застосовуються дві схеми вмикання сельсинів: індикаторна та трансформаторна.
Сельсини, працюючі в трансформаторному або індикаторному режимі, мають по чотири обмотки.
Три обмотки з'єднуються у зірку і мають магнітні осі, зсунуті один щодо одного на 120°. Сукупність трьох розташованих таким чином обмоток звичайно називають трифазною обмоткою.
Якщо трифазна обмотка розташовується на статорі, то четверта однофазна обмотка розташовується на роторі, і навпаки.
Перший варіант застосовується в малопотужних сельсинах, другий — в сельсинах великій потужності.
По типу струму підводу до ротора сельсини діляться на контактні і безконтактні, останні розділяються на неявно - і явно полюсові.
На рис. 1 наведена схема неявно полюсного сельсина з кільцевим трансформатором.
У системах синхронної передачі сельсини збуджуються однофазним змінним струмом, тому в кожному із сельсинів незалежно від його функцій утвориться пульсуючий магнітний потік, що відображає в обмотках синхронізації трансформаторну електрорушійну силу (Е.Р.С), пропорційну косинусу кута між віссю фази обмотки синхронізації і напрямком магнітного потоку. Е. р. с. на затискачах обмотки синхронізації виходить як різниця відповідних фазних е. р. с.:
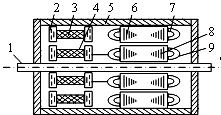
Рис.1. Безконтактний неявно полюсний сельсин з кільцевим трансформатором. 1 - вал ротора; 2 – магніто провід кільцеві трансформатори (КТ); З – первинна обмотка КТ; 4 - вторинна обмотка КТ; 5 - корпус; 6 - пакет статора; 7 - обмотка синхронізації; 8 - пакет ротора; 9 - обмотка збудження.
Звичайно сельсини застосовуються попарно. Один називається сельсином-датчиком (СД), а інший — сельсином - приймачем (СП).

На рис. 2 показані сельсини, працюючі в трансформаторному режимі.
При роботі сельсинної дистанційної системи в трансформаторному режимі ротор СП фіксується в довільному положенні жорстко. До статорної обмотки СД підводиться живлююча перемінна напруга, а статорна обмотка СП є вихідною. Кут повороту ротора СД є вхідною величиною системи, а вихідний - напруга U вих,що знімається зі статорной обмотки СП. Воно залежить від різниці кутів повороту роторів СД і СП таким чином:
U вих =Um cos (b -a) ,
де Um- максимальне значення U вих;
a- кут повороту ротора СД;
b- кут повороту ротора СД;
Статорами є однофазні обмотки. Роторні обмотки СД сполучені з відповідними обмотками ротора СП. Наобмотку статора СД подається змінний струм. Кінці обмотки статора СП виведені до вихідних клем. Пара включених таким чином сельсинів є датчиком, що перетворює кутове переміщення ротора СД в електричний сигнал, що знімається з обмотки статора СП. Вхіднимсигналом датчика є кут повороту ротора СД щодоротора СП, тобторізниця в кутових положеннях роторів. Вихідним сигналом є напруга, що наводиться в обмотці статора СП.
Для висновку наближеної формули для вихідної напруги СП нехтуватимемо активними опорами обмоток, враховуючи, що вони малі в порівнянні з їх реактивними опорами. Крім того, нехтуватимемо Е.Р.С самоіндукції і Е.Р.С взаємо індукції обмоток, оскільки сума цих Е.Р.С мала в порівнянні з Е.Р.С, наведеної в обмотці потоком збудження. Тоді ефективні значення Е.Р.С у обмотках ротора визначаться формулами
 (1.1)
(1.1)
де  — ефективне значення Е.Р.С, що наводиться в обмотці 1 потоком збудження при
— ефективне значення Е.Р.С, що наводиться в обмотці 1 потоком збудження при  . Позначимо через Z опір кожної фазової обмотки ротора, вважаючи, що вони однакові. Тоді, якщо нехтувати опором сполучних дротів і врахувати, що взаємний вплив обмоток роторів, розташованих на великому віддаленні один від одного, відсутній, а магніто проводи сельсинів працюють в ненасиченому режимі, то ефективні значення струмів у фазових обмотках виразяться формулами
. Позначимо через Z опір кожної фазової обмотки ротора, вважаючи, що вони однакові. Тоді, якщо нехтувати опором сполучних дротів і врахувати, що взаємний вплив обмоток роторів, розташованих на великому віддаленні один від одного, відсутній, а магніто проводи сельсинів працюють в ненасиченому режимі, то ефективні значення струмів у фазових обмотках виразяться формулами
 (1.2)
(1.2)
Ці струми створюють змінні магнітні потоки, які в однофазній обмотці статора СП індукуватимуть електрорушійні сили, ефективні значення яких відповідно рівні
 (1.3)
(1.3)
де  — коефіцієнт пропорційності. Ефективне значення вихідної напруги сельсина приймача буде рівне
— коефіцієнт пропорційності. Ефективне значення вихідної напруги сельсина приймача буде рівне
 (1.4)
(1.4)
Підставляючи сюди вирази (1.3) і враховуючи (1.2) і (1.1), одержимо

або, після тригонометричних перетворень,
 (1.5)
(1.5)
де  — амплітудне значення напруги при нульовому роз узгодженні
— амплітудне значення напруги при нульовому роз узгодженні  . Ця формула показує, що напруга на вихідних клемах сельсинного датчика не залежить від абсолютного кутового положення роторів, а залежить тільки від їх відносного кутового положення. Якщо положення ротора сельсина-приймача зафіксувати, то по величині
. Ця формула показує, що напруга на вихідних клемах сельсинного датчика не залежить від абсолютного кутового положення роторів, а залежить тільки від їх відносного кутового положення. Якщо положення ротора сельсина-приймача зафіксувати, то по величині  можна судити про кут повороту ротора сельсина-датчика. При фіксованому значенні
можна судити про кут повороту ротора сельсина-датчика. При фіксованому значенні  вихіднанапруга сельсинного датчика буде пропорційна
вихіднанапруга сельсинного датчика буде пропорційна  . При малих кутах
. При малих кутах  можнавважати пропорційним .
можнавважати пропорційним .

На рис. 3 показані сельсини СД і СП, працюючі в індикаторному режимі. На відміну від сельсинів, працюючих в трансформаторному режимі, тут однофазна обмотка статора СП, так само як і обмотка статора СД, підключена до джерела змінного струму. Положення ротора СП не фіксується, він може вільно обертатися на своїй осі.
Змінна напруга живлення створює в однофазних обмотках статорів обох сельсинів магнітні потоки, напрямки яких співпадають з напрямками осей обмоток статорів. Ці магнітні потоки відображають у фазових обмотках роторів електрорушійні сили. При однаковому положенні роторів СД і СП по відношенню до обмоток  статорів ці Е.Р.С у відповідних фазових обмотках рівні між собою і протилежні по напряму. Отже, результуючі Е.Р.С у кожній парі сполучених між собою фазових обмоток рівні нулю і струм в ланцюгах роторів відсутній
статорів ці Е.Р.С у відповідних фазових обмотках рівні між собою і протилежні по напряму. Отже, результуючі Е.Р.С у кожній парі сполучених між собою фазових обмоток рівні нулю і струм в ланцюгах роторів відсутній  . Якщо ж ротор СД повернений на деякий кут щодо ротора СП, то Е.Р.С. у відповідних фазових обмотках роторів опиняться різними по величині. Результуючі Е.Р.С у фазових обмотках роторів не будуть рівні нулю, і в ланцюзі роторів виникнуть струми
. Якщо ж ротор СД повернений на деякий кут щодо ротора СП, то Е.Р.С. у відповідних фазових обмотках роторів опиняться різними по величині. Результуючі Е.Р.С у фазових обмотках роторів не будуть рівні нулю, і в ланцюзі роторів виникнуть струми  . Взаємодія результуючих магнітних потоків роторів з магнітними потоками обмоток статорів створює обертаючі моменти. Тому, якщо ротор СД після розвороту на заданий кут зупинити, то ротор СП під дією обертаючого моменту обертатиметься до тих пір, поки не стане в положення
. Взаємодія результуючих магнітних потоків роторів з магнітними потоками обмоток статорів створює обертаючі моменти. Тому, якщо ротор СД після розвороту на заданий кут зупинити, то ротор СП під дією обертаючого моменту обертатиметься до тих пір, поки не стане в положення  . При безперервному обертанні ротора СД з певною швидкістю ротор СП обертатиметься з тією ж швидкістю і стежитиме за ротором СД. Обертаючий момент забезпечує синхронність руху роторів, тому його називають синхронізуючим моментом.
. При безперервному обертанні ротора СД з певною швидкістю ротор СП обертатиметься з тією ж швидкістю і стежитиме за ротором СД. Обертаючий момент забезпечує синхронність руху роторів, тому його називають синхронізуючим моментом.
По аналогії з (1.1) для фазових обмоток ротора сельсина-приймача, що працює в індикаторному режимі, можна записати
 (1.6)
(1.6)
Ефективні значення результуючих Е.Р.С у обмотках роторів будуть рівні
 (1.7)
(1.7)
Після підстановки сюди виразів (1.1) і (1.6) і тригонометричних перетворень одержимо
 (1.8)
(1.8)
Звідси витікає, що результуючі Е.Р.С одночасно звертаються в нуль лише у випадку, тобто при однаковому положенні роторів СД іСП.
Результуючий магнітний потік має складову, направлену по осі обмотки (подовжня складова) статора, і складову, перпендикулярну осі обмотки статора (поперечна складова). Подовжня складова ослабляє магнітний потік обмотки статора, але не створює обертаючого моменту. При малих кутах роз узгодження  вплив подовжньої складової незначний. Поперечна складова створює синхронізуючий момент. Величина синхронізуючого моменту визначається формулою
вплив подовжньої складової незначний. Поперечна складова створює синхронізуючий момент. Величина синхронізуючого моменту визначається формулою
 (1.9)
(1.9)
де  ,
,  — момент, діючий на ротор СП при роз узгодженні
— момент, діючий на ротор СП при роз узгодженні  , рівному
, рівному  .
.
На ротор СД діятиме момент, також рівний  оскільки обмотки роторів однакові і величини струмів, поточних по відповідних обмотках роторів, однакові; але знак цього моменту буде протилежним, оскільки напрями струмів у відповідних обмотках протилежні.
оскільки обмотки роторів однакові і величини струмів, поточних по відповідних обмотках роторів, однакові; але знак цього моменту буде протилежним, оскільки напрями струмів у відповідних обмотках протилежні.
Формула (1.9) показує, що синхронізуючий момент рівний нулю при = 0° і = 180°, тобто в межах зміни від 0° до 360° в системі можливі два стани рівноваги. Проте при = 180° положень ротора СП нестійкі, оскільки при будь-якому  момент, діючий на ротор приймача, збільшує
момент, діючий на ротор приймача, збільшує  і зменшує при
і зменшує при  і навпаки при
і навпаки при  .
.
Практично унаслідок наявності моментів тертя в підшипниках і контактних кільцях, моменту навантаження, неточного балансування роторів, неоднаковості конструктивних і електричних параметрів СД і СП і інших чинників рівноважний стан сельсинної системи наступає при  , тобто стеження ротора СП заротором СД відбуваєтьсяз деякою помилкою. Помилка стеження звичайно визначається експериментально і для сельсинів першого і другого класів точності не перевершує 1,5°. Помилка може бути значно зменшена, якщо вхідний сигнал подається в сельсину систему через редуктор, а вихідний сигнал знімається за допомогою такого ж редуктора.
, тобто стеження ротора СП заротором СД відбуваєтьсяз деякою помилкою. Помилка стеження звичайно визначається експериментально і для сельсинів першого і другого класів точності не перевершує 1,5°. Помилка може бути значно зменшена, якщо вхідний сигнал подається в сельсину систему через редуктор, а вихідний сигнал знімається за допомогою такого ж редуктора.
Помітимо, що висновки, одержані для випадку, коли однофазні обмотки розташовані на статорах СП і СД, залишаються у силі і для випадку, коли однофазні обмотки розташовані на роторах.
Диференціальні сельсини
 Диференціальний сельсин має шість обмоток. Три обмотки статорів, так само як і три роторні, сполучені в зірку з магнітними осями, зсунутими один щодо одного на 120°.
Диференціальний сельсин має шість обмоток. Три обмотки статорів, так само як і три роторні, сполучені в зірку з магнітними осями, зсунутими один щодо одного на 120°.
Диференціальний сельсин включається між двома звичайними сельсинами і, по суті, забезпечує можливість введення додаткового вхідного сигналу.
На рис. 4 представлена схема, в якій диференціальний сельсин (ДС) працює в трансформаторному режимі і використовується як датчик. Поворот ротора СД на кут  викликає поворот результуючого магнітного потоку статора ДС на той же кут, але в протилежну сторону.
викликає поворот результуючого магнітного потоку статора ДС на той же кут, але в протилежну сторону.
Якщо ротор ДС займає таке положення (пунктир), коли магнітні осі його обмоток паралелі відповідним магнітним осям обмоток статора, то Е.Р.С., наведені в обмотках,  ,
,  і
і  ДС, будуть такими ж, як Е.Р.С. у обмотках
ДС, будуть такими ж, як Е.Р.С. у обмотках  ,
,  ,
,  , оскільки потік статора ДС
, оскільки потік статора ДС  займає щодо обмоток ротора таке ж положення, як потік статора
займає щодо обмоток ротора таке ж положення, як потік статора  СД щодо обмоток його ротора. Точно такі ж Е.Р.С. наводитимуться в обмотках ротора СП.
СД щодо обмоток його ротора. Точно такі ж Е.Р.С. наводитимуться в обмотках ротора СП.
Вихідна напруга змінюватиметься відповідно до формули (1.5)
при  .
.
В цьому випадку ДС реалізує індуктивний (а не дротяний) зв'язок обмоток роторів СД і СП.
Якщо ротор ДС повернути на кут  щодо статора, то положення магнітного потоку по відношенню до обмоток
щодо статора, то положення магнітного потоку по відношенню до обмоток  зміниться на кут . Магнітний потік роторних обмоток СП також змінить своє положення на кут . Відповідно до цього зміниться вихідна напруга.
зміниться на кут . Магнітний потік роторних обмоток СП також змінить своє положення на кут . Відповідно до цього зміниться вихідна напруга.
Аналогічний результат можна було б одержати, не повертаючи ротор ДС, а додатково повернувши ротор СД на кут .
Отже, за допомогою ДС організовується другий вхід в сельсиний датчик.
Функція диференціального сельсина відрізняється від функції звичного сельсина-датчика тим, що ДС є не тільки сельсином-датчиком, але і здійснює передачу сигналу до сельсину-приймача від іншого сельсина-датчика.
Рис. 5
На рис. 5 представлена схема управління положенням ротора диференціального сельсина за допомогою двох звичайних сельсинів-датчиків.
На цій схемі диференціальний сельсин виділений пунктиром. Обмотки статорів ДС позначені буквами с, роторні – буквами р. Якщо ротор СД, повернений проти годинникової стрілки на кут , то результуючий магнітний потік статора диференціального сельсина ДС, сполученого з ротором  обернеться на той же кут , але за годинниковою стрілкою і займе положення . При повороті ротора СД на кут за годинниковою стрілкою результуючий магнітний потік
обернеться на той же кут , але за годинниковою стрілкою і займе положення . При повороті ротора СД на кут за годинниковою стрілкою результуючий магнітний потік  ротора ДС, сполученого з ротором СД, обернеться проти годинникової стрілки на той же кут . Взаємодія потоків і
ротора ДС, сполученого з ротором СД, обернеться проти годинникової стрілки на той же кут . Взаємодія потоків і  створює обертаючий момент, який розверне ротор ДС на кут
створює обертаючий момент, який розверне ротор ДС на кут  , тобто до збігу напрямів потоків і . Таким чином, кут повороту ротора
, тобто до збігу напрямів потоків і . Таким чином, кут повороту ротора  диференціального сельсина є сумою алгебри кутів повороту роторів двох сельсинів-датчиків і , які є вхідними сигналами. У розглянутій схемі диференціальний сельсин працює в індикаторному режимі і використовується як суматор кутів поворотів.
диференціального сельсина є сумою алгебри кутів повороту роторів двох сельсинів-датчиків і , які є вхідними сигналами. У розглянутій схемі диференціальний сельсин працює в індикаторному режимі і використовується як суматор кутів поворотів.
Використовування диференціальних сельсинів дозволяє виробляти управління об'єктами з декількох пунктів.
В індикаторній синхронній передачі (рис 1.6) обмотки збудження датчика і приймача підключають до однієї мережі змінного струму. При неузгодженості СД і СП на деякий кут  у ланцюзі синхронізації з'являються зрівняльні струми. У результаті взаємодії їх з магнітними потоками приймача виникає синхронізуючий момент, під впливом якого СП приходить у погоджене положення СД.
у ланцюзі синхронізації з'являються зрівняльні струми. У результаті взаємодії їх з магнітними потоками приймача виникає синхронізуючий момент, під впливом якого СП приходить у погоджене положення СД.
У трансформаторній синхронній передачі (див. рис 1.6) обмотка збудження СП підключена до мережі змінного струму. У приймачі СТ трифазна обмотка створює магнітний потік, вісь якого займає таке ж положення, як і в СД. При повороті ротора СД на такий же кут повертається магнітний потік приймача СТ ; цей кут повороту можна зафіксувати за значенням Е. Р. С. обмотки приймача СТ .
Конструкції сельсинів
Існує велика кількість різноманітних конструкцій сельсинів. Магнітний ланцюг у них виконується як за принципом машин постійного струму, так і по типу синхроних машин із явно і неявно вираженими полюсами. Обмотка, що синхронізує і обмотка збудження, можуть розташовуватися, на відміну від приведених вище сельсинів, відповідно на статорі і на роторі.
Крім сельсинів з контактними кільцями на роторі існує ряд конструкцій безконтактних сельсинів, в яких всі обмотки розміщаються на статорі.