1. АЦП розгортального перетворення
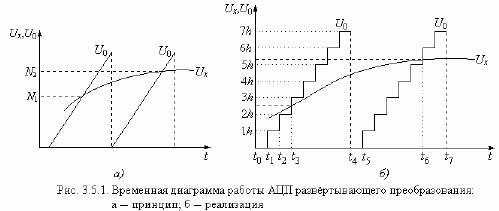
Принцип роботи АЦП розгортального перетворення полягає в зіставленні вхідної напруги Ux (рис. 3.5.1,а) з еталонним U0, лінійним нарощуванням еталонного напруги U0 і формування чисел N1, N2, ..., Ni, пропорційний вхідній напрузі Ux, коли еталонну напругу U0 досягне вхідного: U0 = Uх.
Структурна схема АЦП розгортального перетворення (урівноваження) наведена на рис. 3.5.2.
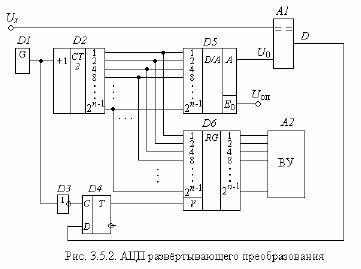
До складу АЦП розгортального перетворення входять наступні пристрої:
- генератор прямокутних імпульсів D1;
- лічильник імпульсів D2;
- ЦАП D5;
- формувач одиничного імпульсу D3, D4 для запуску регістра D6;
- компаратор А1;
- відтворююче пристрій А2, яким може бути цифровий індикатор, інтерфейс передачі та ін.
АЦП працює наступним чином.
З кожним імпульсом генератора D1 вміст лічильника D2 збільшується на одиницю, з-за чого еталонну напругу U0 на виході ЦАП D5 зростає на один крок квантування h.
Так, у момент t1 в лічильник D2 надходить один імпульс і тому U0 = 1h. У момент t2 вміст лічильника дорівнює 2, з-за чого U0 = 2h. У момент t3 еталонне напруга становить U0 = 3h і т.д. Таким чином, вмістом лічильника D2 є номер рівня еталонного напруги U0.
Після кожного імпульсу генератора D1 через напівперіод на виході інвертора D3 з'являється фронт для запуску тригера D4, щоб записати в регістр D6 вміст лічильника D2. Однак запуск тригера D4 відбувається не завжди, а тільки при U0 ≥ Uх. (Слід зауважити, що інвертор D3 і тригер D4 виконують функцію формувача одиничного імпульсу, схема якого не має значення, і може бути іншою. Тут наведено один найпростіший з багатьох інших можливих варіантів).
До моменту t3 сигнал Uх недокомпенсований (U0 < Uх) і тому D = 0. Тригер D4 залишається в нульовому стані, з-за чого вміст лічильника D2 в регістр D6 не записується.
У момент t3 на третьому імпульсі в лічильнику D2 сигнал перекомпенсований (U0 > Uх) еталонним напругою U0 = 3h, з-за чого на виході компаратора D = 1. Тригер D4 підготовлений до взводу. Через напівперіод після моменту t3 на вхід С тригера з'являється фронт і тригер D4 зводиться, записуючи вміст лічильника D2 в регістр D6, тобто 3. Так, в момент t3 значення вхідної напруги Uх перетворилося в номер рівня 3h, тобто в число 3.
Незважаючи на велике чи мале вхідна напруга Uх, лічильник D2 після перекомпенсації продовжує накопичувати імпульси до повної ємності. При цьому тригер D4 залишається у зведеному стані. Фронту на його виході немає, і тому вміст регістра D6 не оновлюється.
В момент t4 лічильник D2, переповнившись, скидається. Сигнал Uх знову недокомпенсований (U0 < Uх) і тому D = 0. Наступний фронт інвертора D3 скидає тригер D4. Його вихідний зріз при цьому не оновлює запис в регістр D6, залишаючи в ньому вміст 3.
З моменту t5 процес заповнення лічильника D2 і наслідків цього повторюється. До моменту t6 сигнал Uх не докомпенсований (U0 < Uх) і тому D = 0. Тригер D4 залишається в нульовому стані, з-за чого вміст лічильника D2 в регістр D6 не записується.
У момент t6 в лічильник D2 надійшло 6 імпульсів. При цьому еталонну напругу U0 = 6h перевищує вхідний Uх, тобто настає перекомпенсація сигналу (U0 > Uх), із-за чого D = 1. Тригер D4, зводячись, записує в регістр D6 новий номер рівня еталонного напруги U0 = 6h, тобто 6. Так, в момент t6 вхідна напруга Uх перетворилося в номер рівня 6h, тобто число 6 і т.д.
Таким чином, з кожним фактом перекомпенсації сигналу (U0 > Uх) оновлюється вміст регістра D6, є результатом аналого-цифрового перетворення. Ці результати надходять на відтворююче пристрій ВУ А2, призначення та схема якого для кожної окремої задачі. ВУ може бути дешифратором цифрового індикатора, перетворювачем коду, інтерфейсом системи передачі даних тощо
Перевагою АЦП розгортального перетворення (рис. 3.5.2) є висока роздільна здатність, обумовлена відсутністю зворотного зв'язку (зв'язок А1 - D4 не є зворотним, оскільки не впливає на роботу елементів тракту сигналу: D2, D5 і ін). Тому можна без появи самозбудження збільшувати коефіцієнт посилення компаратора А1, підвищуючи тим самим роздільну здатність.
Істотним недоліком АЦП розгортального перетворення є дуже низька швидкодія. Воно обумовлене тим, що незалежно від рівня вхідної напруги Uх (рис. 3.5.1,б), лічильник імпульсів D2 (рис. 3.5.2) починає свою роботу з нуля (моменти t0, t4, t7 тощо) для кожного перетворення (моменти t3, t6, ..., .). При цьому витрачається значний час t3 ... t4. Цей недолік усунуто в стежить АЦП.
2. Стежачий АЦП
Принцип дії стежачого аналого-цифрового перетворення полягає в тому, що після кожної перекомпенсації еталонну напругу U0 (рис. 3.5.3) зменшується не на всю величину, а лише настільки, щоб викликати не докомпенсацію. Так еталонну напругу U0 "стежить" за вхідною напругою Uх, відхиляючись від нього лише на малу величину. На це відхилення вимагається порівняно короткий час, через що підвищується швидкодія.

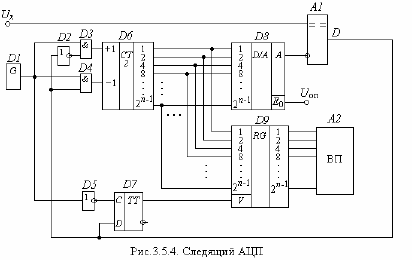
Схема АЦП стежачого наведена на рис. 3.5.4.
Вона відрізняється від схеми АЦП розгортального перетворення (рис. 3.5.2) лише тим, що лічильник імпульсів D6 (рис. 3.5.4) реверсивний, а вихід D компаратора А1 пов'язаний з додатковими елементами D2, D4 для керування напрямком рахунку.
АЦП працює наступним чином.
До моменту t3 (рис. 3.5.3) еталонну напругу U0 менше вхідного Uх. Сигнал не докомпенсований (U0 < Uх), із-за чого D = 0 і тому інвертором D2 і схемою І D3 відкритий вхід додавання +1 лічильника D6. Тоді в моменти t1, t2 і t3 лічильник D6 накопичує імпульси, підвищуючи допомогою ЦАП D8 еталонну напругу U0.
У момент t3 на третьому імпульсі в лічильнику D6 сигнал перекомпенсований (U0 > Uх) еталонним напругою U0 = 3h, з-за чого на виході компаратора D = 1. Тригер D7 підготовлений до взводу. Через напівперіод після моменту t3 на вхід С тригера з'являється фронт і тригер D7 зводиться, записуючи вміст лічильника D6 в регістр D8. Так, в момент t3 вхідна напруга Uх перетворилося в номер рівня 3h, тобто в число 3.
При перекомпенсації (U0 > Uх) напруга D = 1 закриває елементами D2 і D3 вхід +1 і відкриває схемою І D3 вхід віднімання -1 лічильника D6. Тому в момент t4 вміст лічильника D6 зменшується на одиницю, знижуючи тим самим еталонну напругу U0 на один крок квантування h. Вхідна напруга Uх стає не докомпенсованим (U0 < Uх), із-за чого напруга D = 0 елементами D2, D3 і D4 повертає режим додавання лічильника D6.
У момент t5 вміст лічильника D6 збільшується на одиницю, підвищуючи еталонну напругу U0 на один крок h, але сигнал залишається не докомпенсованим (U0 < Uх). Тому режим лічильника D6 не змінюється і в момент t6 вміст лічильника збільшується до 4. Оскільки при цьому настає перекомпенсації (U0 > Uх), то вміст 4 заноситися в регістр D8.
Далі цей процес триває. Так, в момент t7 еталонну напругу U0 зменшитися на h, в моменти t8 і t9 збільшиться відповідно на h і в момент t9 перекомпенсовує сигнал. В лічильнику D6 і відповідно в регістрі D8 буде число 5 і т.д.
Так, еталонну напругу U0 змінюється не на весь свій діапазон, як в АЦП розгортального перетворення, а лише на кілька кроків квантування, "слідкуючи за вхідною напругою Uх. Це "спостереження" і підвищує швидкодію.
Основним недоліком слідкуючого АЦП є наявність в ньому зворотного зв'язку (А1 - D6). Тому стежать АЦП схильні до самозбудженню. З-за цього посилення в компараторі А1 повинно бути менше, ніж в АЦП розгортального перетворення. Тоді і роздільну здатність менше.
Наступним недоліком є те, що час перетворення хоч і менше, ніж в АЦП розгортального перетворення, проте може займати кілька кроків квантування.
Цей недолік усунений у АЦП паралельного кодування, де час перетворення завжди дорівнює лише одного кроку квантування.
ПОНЯТТЯ І ВИЗНАЧЕННЯ АВТОМАТИКИ
Автоматизація виробничих процесів - це етап розвитку машинного виробництва, коли функції контролю і управління, що раніше виконувало людиною, передаються приладам і автоматичним пристроям.
Необхідність автоматизації, тобто виключення безпосередньої участі людини з процесу управління промисловими об'єктами, викликана, перш за все обмежуються можливостями людини.
Сучасні виробничі процеси характерні підвищенням швидкостей, зростанням розмірів і потужностей агрегатів, збільшенням необхідної точності регулювання і надзвичайним ускладненням. Для ефективного управління такими процесами необхідно сприймати, запам'ятовувати і переробляти з великою швидкістю і достовірністю таку кількість всіляких відомостей, що людський мозок не в змозі справитися з цією задачею.
Слід відрізняти автоматизацію від механізації.
Механізація є необхідною передумовою автоматизації, але зводиться до передачі машині лише механічних, пов'язаних з великими м'язовими зусиллями, функцій людини у виробничому процесі.
Автоматизація включає, крім того, передачу машині функцій людини, пов'язаних з роботою його мозку.
Можна сказати, що автоматизація - це механізація розумової праці.
Системи, в яких управління об'єктом здійснюється без безпосередньої участі людини, називається автоматичними.
Прийнято розрізняти часткову, комплексну і повну автоматизацію.
Під частковою автоматизацієюмають на увазі звільнення людини від деяких простих функцій управління, таких, як вимірювання вихідних величин системи і стабілізація їх, контроль працездатності об'єктів, сигналізація небезпеки і т.д.
Іноді при цьому повністю автоматизуються окремі агрегати або деякі їх режими, а управління в цілому (вибір режимів і програм для окремих агрегатів і регуляторів) залишається за людиною.
Комплексна автоматизація означає автоматизацію всіх основних і допоміжних операцій виробничого процесу.
Наприклад, видобуток корисних копалин, їх транспортування і вантаження в залізничні вагони здійснюється за допомогою систем управляючих пристроїв, об'єднаних загальною системою управління. Функції людини зводиться до завдання програм управління, вибору режимів роботи устаткування, спостереженню за ходом виробничого процесу і аналізу результатів роботи підприємства.
Повна автоматизація - це завершальний етап автоматизації виробництва, що означає повну передачу функцій управління автоматичним пристроям.
При цьому управляюча система на підставі збираної нею інформації самостійно вирішує задачі оптимального управління без якої-небудь участі людини. Роль людини зводиться до настройки, регулювання устаткування і систем управління, їх вдосконалення і спостереження за ходом виробничого процесу.
Автоматизація неможлива без розвитку теорії автоматичного управління і технічних засобів, що дозволяють вирішувати різноманітні задачі управління.

