Радионавигационные системы дальней навигации
РАЗДЕЛ 9. РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
Просторовим аспектомфункціонування другої, психічної підсистеми є психообмін.Сюди належать впливи людського оточення на рівні мікрогрупи, колективу (навчального, трудового), людського суспільства. Просторовим(зовнішнім) до підсистеми "духовне" є світські ірелігійні духовні концепції, вищідуховні закони,закони моралі, загальнолюдські цінності
Структурна модель людини і зовнішні її складові дозволяють виокремити від світового інтегрованого вчення про людину валеологічний аспект. Розробка його в обраній логіці представлена (від тілесного до духовного) і лежить в основі даного навчального посібника.
Вітчизняні і світові здобутки мають складну основу в обраному підході до вирішення проблем здоров'я сучасної людини. Такий підхід до людини і до обрання стратегії і тактики оздоровлення є системним і дозволяє створити просту матрицю викладання валеології у вищій та середній школі, яка грунтується на законах функціонування людини як системи і основних трьох завданнях її життя: виживання, репродукції, реалізації себе як особистості.
У розляді системоутворюючого поняття курсу "здоров'я", його інтегрального змісту, специфіки процесів, що відбуваються в організмі людини під дією сукупності внутрішніх і зовнішніх факторів, в обраному підході виділяються такі складові здоров'я: фізичне, психічне, духовне. Індуктивний принцип структурування, подачі та осмислення навчального матеріалу слугує реалізації основних завдань курсу.
План раздела:
9.1 Радионавигационные системы дальней навигации;
9.1.1. Особенности радиосистем дальней навигации;
9.1.2. Фазовые дальномерные РСДН;
9.1.3. Фазовые разностно-дальномерные РСДН;
9.1.4. Точность фазовых РСДН;
9.2. Радиосистемы ближней навигации и посадки;
9.2.1. Особенности радиосистем ближней навигации и посадки;
9.2.2. Канал дальности РСБН;
9.2.3. Канал азимута РСБН;
9.2.4. Радиосистемы посадки.
К радиосистемам дальней навигации (РСДН) относятся позиционные системы определения местоположения подвижных объектов (потребителей навигационной информации), дальность действия которых не ограничена дальностью прямой видимости и составляет тысячи километров. Несущие частоты сигналов РСДН лежат в пределах 10…100 кГц.
Все РСДН представляют собой пассивные многопозиционные системы, основу которых составляет сеть опорных передающих радиостанций, размещаемых в точках с известными координатами (радионавигационные точки РНТ). Опорные станции (ОС) в моменты  излучают навигационные сигналы, по которым потребитель, имеющий только приемную аппаратуру и устройства обработки сигналов, находит свое местоположение. При этом он использует собственный эталон времени (опорный генератор), с помощью которого измеряется время приема приходящего от ОС навигационного сигнала. Моменты излучения сигналов синхронизированы со шкалой Всемирного координированного времени (UTC).
излучают навигационные сигналы, по которым потребитель, имеющий только приемную аппаратуру и устройства обработки сигналов, находит свое местоположение. При этом он использует собственный эталон времени (опорный генератор), с помощью которого измеряется время приема приходящего от ОС навигационного сигнала. Моменты излучения сигналов синхронизированы со шкалой Всемирного координированного времени (UTC).
Геометрическим элементом  , измеряемым в РСДН, является расстояние от потребителей до ОС или разность таких расстояний до двух ОС, а информационный параметр сигнала – фаза несущей частоты. Поэтому эти системы относятся к классу фазовых дальномерных, квазидальномерных и разностно-дальномерных.
, измеряемым в РСДН, является расстояние от потребителей до ОС или разность таких расстояний до двух ОС, а информационный параметр сигнала – фаза несущей частоты. Поэтому эти системы относятся к классу фазовых дальномерных, квазидальномерных и разностно-дальномерных.
Особенности дальномерных систем. Системы этого класса требуют синхронной работы эталона времени ОС, задающего моменты , и опорного генератора потребителя, задающего моменты  , в которые включается измеритель времени приема навигационного сигнала. При синхронной работе этих генераторов измеренное расстояние от потребителя до
, в которые включается измеритель времени приема навигационного сигнала. При синхронной работе этих генераторов измеренное расстояние от потребителя до  -й ОС
-й ОС
 , (9.1)
, (9.1)
где  ,
,  ,
,  – известные координаты ОС;
– известные координаты ОС;  ,
,  ,
,  – искомые координаты потребителя в некоторой, например, геоцентрической системе координат. Для вычисления трех координат потребителя необходимы три независимых уравнения, подобных (9.1), т.е. нужно измерить три дальности
– искомые координаты потребителя в некоторой, например, геоцентрической системе координат. Для вычисления трех координат потребителя необходимы три независимых уравнения, подобных (9.1), т.е. нужно измерить три дальности  по трем опорным станциям (=1, 2, 3). Обычно одна из координат (высота потребителя) известна, например по данным высотомера, и для расчета координат точки П (рис. 9.1,а), где находится потребитель, достаточно найти две линии положения ЛП (окружности) по дальностям
по трем опорным станциям (=1, 2, 3). Обычно одна из координат (высота потребителя) известна, например по данным высотомера, и для расчета координат точки П (рис. 9.1,а), где находится потребитель, достаточно найти две линии положения ЛП (окружности) по дальностям  и
и  до опорных станций
до опорных станций  и
и  с базой
с базой  .
.
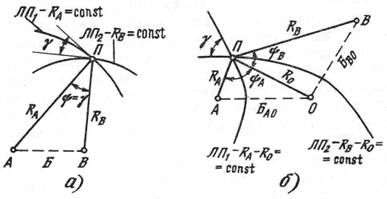
Рис. 9.1. Диаграммы определения местоположения на плоскости дальномерной (а) и разностно-дальномерной (б) системами
Особенности квазидальномерных систем. Такие системы используются при недостаточной стабильности опорного генератора потребителя, когда моменты излучения сигнала ОС и включения измерителя времени потребителя не соответствуют друг другу, т.е. имеется расхождение временных шкал системы и потребителя  . Тогда измеренная потребителем дальность
. Тогда измеренная потребителем дальность  отличается от истинной на
отличается от истинной на  и выражение (9.1) принимает вид
и выражение (9.1) принимает вид
 . (9.2)
. (9.2)
Так как  априори не известно, то для определения истинного местоположения необходимо увеличить на единицу число измерений расстояний до опорных станций. Системы, реализующие алгоритм (9.2), называются квазидальномерными, а величина – квазидальностью.
априори не известно, то для определения истинного местоположения необходимо увеличить на единицу число измерений расстояний до опорных станций. Системы, реализующие алгоритм (9.2), называются квазидальномерными, а величина – квазидальностью.
Точность дальномерных и квазидальномерных РСДН. Средняя квадратическая погрешность (СКП) определения местоположения  связана с СКП
связана с СКП  измерения элемента соотношением
измерения элемента соотношением  , где
, где  – геометрический фактор, характеризующий зависимость точности системы от взаимного положения потребителя и опорных станций. В дальномерной (квазидальномерной) системе геометрический фактор
– геометрический фактор, характеризующий зависимость точности системы от взаимного положения потребителя и опорных станций. В дальномерной (квазидальномерной) системе геометрический фактор
 . (9.3)
. (9.3)
Особенности разностно-дальномерных систем. В этих системах измеряется разность расстояний до -й и  -й опорный станций:
-й опорный станций:
 (9.4)
(9.4)
Значение  не зависит от , а следовательно, и от стабильности опорного генератора потребителя, что является основным преимуществом разностно-дальномерных систем. Для вычисления двух координат потребителя (при известной высоте последнего) нужно измерить две разности расстояний
не зависит от , а следовательно, и от стабильности опорного генератора потребителя, что является основным преимуществом разностно-дальномерных систем. Для вычисления двух координат потребителя (при известной высоте последнего) нужно измерить две разности расстояний  и
и  по трем ОС (на одну больше, чем в дальномерной системе). Положение точки П, в которой находится потребитель, рассчитывается по пересечению двух линий положения ЛП (гипербол), создаваемых опорными станциями , и
по трем ОС (на одну больше, чем в дальномерной системе). Положение точки П, в которой находится потребитель, рассчитывается по пересечению двух линий положения ЛП (гипербол), создаваемых опорными станциями , и  (рис. 9.1,б).
(рис. 9.1,б).
Точность разностно-дальномерных систем. Геометрический фактор в системах этого класса
 . (9.5)
. (9.5)
Углы, входящие в (9.5), показаны на рис. 9.1.
Из сравнения (9.3) и (9.5) очевидна большая зависимость геометрического фактора разностно-дальномерной системы от положения потребителя, чем в дальномерной системе, что объясняется расхождением гиперболических линий положения по мере удаления от базы системы, а следовательно, и увеличением линейной погрешности. Минимального значения геометрический фактор  достигает при
достигает при  , что соответствует наивысшей точности системы. Дальномерная система обеспечивает требуемую точность (т.е. заданное значение геометрического фактора) в значительно большей зоне.
, что соответствует наивысшей точности системы. Дальномерная система обеспечивает требуемую точность (т.е. заданное значение геометрического фактора) в значительно большей зоне.

