Сучкорезно-раскряжевочные машины (процессоры) предназначены для получения сортиментов в условиях лесосеки или погрузочной площадки (верхнего склада). Основными операциями, выполняемыми процессором являются: обрезка сучьев с предварительно поваленных деревьев и раскряжевка их на сортименты. По размещению технологического оборудования сучкорезно-раскряжевочные машины делятся на машины манипуляторного типа (сучкорезно - раскряжевочная головка расположена на манипуляторе); с размещением технологического оборудования на машине и на прицепные машины.
Сучкорезно-раскряжевочная машина ЛО-115.Сучкорезно-раскряжевочная машина ЛО-115 – совместная разработка советских и чехословацких специалистов. В качестве базы использован чехословацкий колесный трактор ВКС-160 с двигателем мощностью 118 кВт.
Машина предназначена для очистки деревьев от сучьев и раскряжевки хлыстов на сортименты. Сучкорезно-раскряжевочная машина ЛО-115 может обрабатывать деревья как хвойных, так и лиственных пород диаметром в комле до 0,6 м, при этом обрабатываемые деревья могут быть уложены в штабель на лесопогрузочном пункте или на пасеке в пачках после валочно-пакетирующих машин или находиться в разрозненном виде после валки деревьев бензиномоторными пилами.
Машины может работать в районах с умеренным климатом и равнинным или слабохолмистым рельефом при крутизне склонов до 9°, при высоте преодолеваемых препятствий до 0,4 м, на грунтах с несущей способностью не менее 150 кПа.
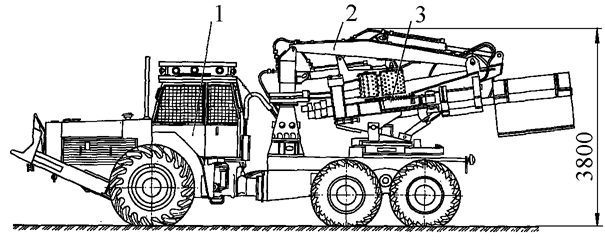
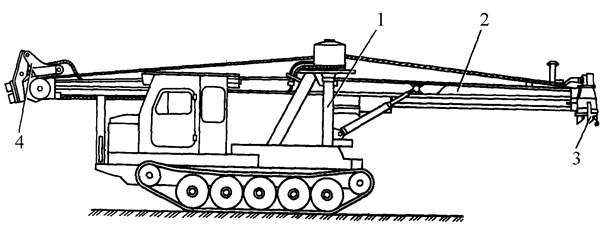
Сучкорезно-раскряжевочная машина ЛО-115 (рис. 1) состоит из базового трактора, на раме которого устанавливается технологическое оборудование, состоящее из загрузочного устройства, сучкорезно-раскряжевочного стола, гидросистемы и электрооборудования.
На опорно-поворотном устройстве установлен манипулятор, состоящий из стрелы, рукояти и захвата. Основанием манипулятор устанавливается на раму базового трактора и крепится к ней. Манипулятор служит для захвата комля дерева из штабеля или с земли и подачи его в сучкорезно-раскряжевочное устройство. Привод всех механизмов гидравлический. Перемещение стрелы и рукояти в вертикальной плоскости осуществляется с помощью гидроцилиндров. Захват к концу рукояти крепится шарнирно. При складывании манипулятора в транспортное положение во избежание раскачивания челюсти фиксируются на колонне опорно-поворотного устройства.
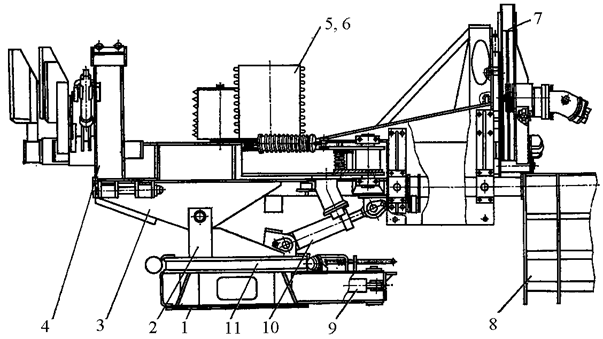
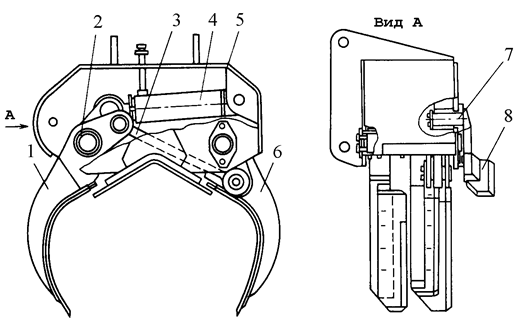
Сучкорезно-раскряжевочный стол (рис. 2) состоит из основания 1, платформы 2, рамы 3, сучкорезной головки 4, протаскивающего механизма 5, механизма отмера длин 6, дисковой пилы 7, накопителя 8, гидроцилиндров 9 и 10 и поворотной опоры 11.
Сучкорезная головка обеспечивает обрезку сучьев с деревьев с максимальной кривизной ствола до 15%. Протаскивающий механизм обеспечивает протаскивание дерева через сучкорезную головку и является захватом, удерживающим дерево при пилении. Механизм отмера длин предназначен для отмера длин выпиливаемых сортиментов в диапазоне от 1 до 15 м с шагом 0,5 м.
Дисковая пила предназначена для раскряжевки хлыстов на сортименты. Имеются шарниры для поворота ее в транспортное положение. Для сортировки сортиментов длиной 2 м и менее предназначен накопитель.
Гидравлическая система машины ЛО-115 служит для управления рабочими органами трактора и навесного технологического оборудования. Гидросистема делится на две части: гидросистему базового трактора и гидросистему навесного оборудования. Обе части гидросистемы соединяются между собой трубопроводами. С целью совмещения операций при работе навесным оборудованием питание исполнительных органов осуществляется от трех гидроцилиндров. Возможность совмещения операций сокращает продолжительность рабочего цикла и повышает производительность машины в целом. Привод вальцов и дисковой пилы осуществляется гидромоторами. Номинальное рабочее давление гидромоторов 16 МПа.
Рис. 2. Сучкорезно-раскряжевочный стол машины ЛО-115
Электронная аппаратура машины предназначена для обеспечения автоматического и полуавтоматического режимов работы технологического оборудования. Кабина машины снабжена поворотным сиденьем и пультом, с которого управление может осуществляться как в ручном, так и в автоматических режимах.
Работа машины осуществляется следующим образом. Тракторист-оператор подъезжает к поваленным деревьям и останавливает машину слева или справа от них. Переводит технологическое оборудование из транспортного положения в рабочее. Наводит загрузочное устройство на дерево и захватывает его за комлевую часть на расстоянии около 1,5 м от комля. Поднимает комель дерева и укладывает его на сучкорезно-раскряжевочный стол, ориентируя его по оси дерева. Далее оператор оценивает длину и качество дерева и выбирает количество и длину сортиментов, а также последовательность их выпиливания. В соответствии с оценкой, он набирает программу раскроя. Обработка дерева производится автоматически после нажатия кнопки "пуск". После окончания обработки дерева работа технологического оборудования автоматически прекращается. Обработка дерева может производиться также вручную с последовательным управлением каждой операцией обработки дерева.
Сучкорезная головка силового резания состоит из двух подвижных ножей и одного неподвижного. Нож, откусывающий вершинную часть дерева, установлен на раме сучкорезной головки и состоит из рычага с ножом силового резания и гидроцилиндром привода. Максимальный диаметр отсекаемой вершины 100 мм. Управление ножом осуществляется автоматически или тумблером сведения ножей.
Протаскивающий механизм представляет собой два ошипованные вальца с приводом от двухступенчатого редуктора.
Механизм отмера длин состоит из ошипованного барабана заказов, закрепленного на одном конце двуплечевого рычага. Рычаг качается на корпусе протаскивающего механизма. Прижим ошипованного барабана заказов механизма отмера длин к стволу дерева осуществляется пружиной.
Дисковая пила для раскряжевки хлыста крепится к раме сучкорезного стола и имеет шарниры для поворота ее в транспортное положение. Пила состоит из кронштейна, гидроцилиндра, маятника, кожуха, пильного диска и одноступенчатого редуктора. В конструкции пилы предусмотрен успокоитель поперечных колебаний, а также имеется гидротормоз. Приводом надвигания и возврата пилы в исходное положение служит гидроцилиндр.
Накопитель крепится к левой задней части рамы сучкорезно-раскряжевочного стола и состоит из серповидного бункера. Бункер жестко крепится к трубе, которая поворачивается в опорах кронштейнов гидроцилиндром для разгрузки бункера.
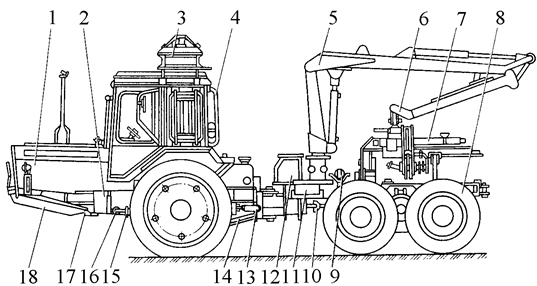
Сучкорезно-раскряжевочная машина ЛО-123.Сучкорезно-раскряжевочная машина ЛО-123 предназначена для подтаскивания поваленных деревьев, обрезки сучьев и раскряжевки хлыстов с автоматическим отмером длин сортиментов, а также для окучивания сортиментов, с частичной сортировкой их по длинам, для сбора порубочных остатков с укладкой их на волок при несплошных рубках леса. Машина может также использоваться на сплошнолесосечных рубках при среднем объеме хлыста до 0,3 м3.
Сучкорезно-раскряжевочная машина ЛО-123 (рис. 3) состоит из базовых агрегатов трактора МТЗ-80 с унифицированной кабиной и задней тележки автогрейдера ДЗ-143 (ДЗ-122), а также шасси, трансмиссии, универсального манипулятора ЛВ-184, подвески, сучкорезно-раскряжевочного захвата, гидросистемы и электрооборудования машины.
Базовый трактор МТЗ-80 используется без передней оси с колесами и передних крыльев, рулевых тяг и гидроусилителя рулевого управления, буксирного устройства, автоматической сцепки, гидрокрюка с гидроцилиндром и подножки. Трактор дооборудуется узлами ограждения двигателя и заднего и боковых стекол кабины, приводом тормозов, блокировкой дифференциала, дублированным управлением подачи топлива, поворотным сиденьем. Аккумуляторные батареи вынесены из кабины и установлены на шасси машины. Колеса трактора дооборудованы защитой ниппелей и усилением ободьев. Поворот машины производится при помощи двух силовых гидроцилиндров при помощи рулевого управления.
На передней раме шасси установлен бак гидросистемы с размещенными на нем двумя ручными гидрораспределителями и двумя фильтрами гидросистемы. За баком на кронштейне закреплены шесть блоков клапанов. На крыше кабины трактора установлен калорифер с принудительным охлаждением рабочей жидкости гидросистемы и четыре фары освещения рабочей зоны машины. На месте крышки бокового вала отбора мощности трактора крепится установка насосов. Внутри кабины размещены четыре рукояти управления гидрораспределителями и блоки электрооборудования автоматизированной системы управления технологическим оборудованием и программным отмером длин сортиментов. Рама шасси с помощью шарнирного разъема опирается на редуктор задней тележки автогрейдера. Рама заканчивается бамперной балкой с проушиной и быстросъемным пальцем для буксировки.
В транспортном положении сучкорезно-раскряжевочная головка манипулятора устанавливается на опорную балку и стойку шасси. Шасси с помощью пальца и четырех болтов присоединяется соответственно к проушинам картера заднего моста и чулкам задних осей трактора. Швеллеры передней рамы трактора на пальцах крепятся к втулкам кронштейнов, соединенных на болтах с лонжеронами рамы трактора. Кронштейны выполнены с проушинами и быстросъемными пальцами для буксировки. На правом (по ходу машины) кронштейне с помощью хомутов установлен ресивер с регулятором давления.
Привод тележки автогрейдера осуществляется от заднего вала отбора мощности трактора через синхронизирующий редуктор, промежуточную опору и хвостовину посредством трех карданных валов. Синхронизирующий редуктор с карданным валом размещены в передней раме шасси и снизу защищены съемным поддоном. Второй карданный вал проходит между проушинами шарнирного сочленения шасси. Третий карданный вал соединяет вал промежуточной опоры с хвостовиком, закрепленным на шпильках к редуктору задней тележки автогрейдера. Все колеса машины ведущие.
Машина работает следующим образом. Манипулятором сучкорезно-раскряжевочная головка наводится на поваленное дерево. Сучкорезные ножи и челюсти захватывают ствол дерева и манипулятором оно подтаскивается в удобную для раскряжевки и безопасную для растущих деревьев зону. Тракторист-машинист на пульте управления задает нужную программу раскроя дерева и включением пилы производит оторцовку комля. Затем включается в работу гидроцилиндр выдвижения балки и начинается обработка дерева. Сучкорезные ножи срезают сучья на всем пути хода гидроцилиндра. При этом автоматически уменьшается усилие смыкания сучкорезных ножей с одновременным повышением его в приводе челюстей захвата. Включением обратного хода балки подается очищенная от сучьев часть ствола к раскряжевочной нише. В это время увеличивается усилие смыкания на сучкорезных ножах с одновременным уменьшением его на челюстях захвата. Для более надежной подачи дерева в этот момент включается фиксатор ствола, расположенный на кронштейне сучкорезных ножей. Операции по перемещению сучкорезных ножей и подаче ствола автоматически повторяются до тех пор, пока не будет отмерена заданная длина сортимента. Затем включается пила, выпиливается сортимент. Цикл повторяется до полной обработки дерева. При этом тракторист манипулятором штабелюет (окучивает) разделанные сортименты с частичной их подсортировкой по длинам по краям технологического коридора (волока) или в просветы между растущими деревьями. Вершинная часть ствола и обрезанные сучья переносятся на волок под будущую колею движения машины. Машина с сучкорезно-раскряжевочной головкой, двигаясь по волоку, обеспечивает обработку деревьев как с комля, так и с вершины, поваленных под любым углом к волоку. С помощью захвата можно перерабатывать ветровальные деревья, а также применять его при строительстве лесных дорог и подготовке погрузочных площадок.
Для работы машины на несплошных рубках леса прокладываются технологические коридоры (волоки) шириной 3…3,5 м. Расстояние между волоками устанавливается в зависимости от принятой технологии разработки лесосек.
Шасси машины ЛО-123 состоит из передней и задней рам, корпуса шарнира, балки, опоры, стойки, гидроцилиндров поворота машины и блокировки продольного шарнира.
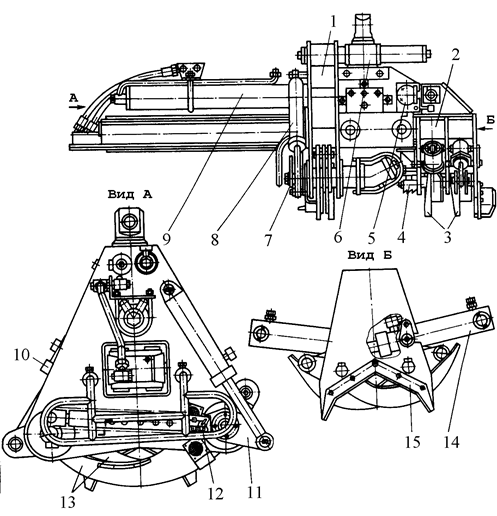
Сучкорезно-раскряжевочная головка (рис. 4) – гидрофицированный рабочий орган, навешиваемый на манипулятор машины. Головка состоит из корпуса с челюстями, выдвижной балки с сучкорезными ножами и фиксатором отвала, раскряжевочной цепной пилы, ротатора, гидросистемы и электрооборудования.
Захват сучкорезно-раскряжевочный имеет две челюсти, соединенные между собой синхронизирующей тягой, с приводом от одного гидроцилиндра. Челюстями осуществляется захват поваленного дерева, его центрирование, зажим ствола в процессе обрезки сучьев и раскряжевки. Челюсти сварной конструкции, каждая состоит из трубы с запрессованными в нее втулками, клыка из толстолистового проката, проушины для крепления соответственно пальца гидроцилиндра и синхронизирующей тяги. На одной из челюстей приварен кронштейн для крепления постоянного магнита электрооборудования.
Выдвижная балка представляет собой сварную коробчатую конструкцию с продольными конусными направляющими для качения по ним катков и предназначена для прямолинейного возвратно-поступательного перемещения сучкорезных ножей при обрезке сучьев и подачи обработанного участка ствола в зону раскряжевочной пилы. В передней части выдвижной балки приварен кронштейн, состоящий из трех листов, для размещения в нем двух подвижных сучкорезных ножей с гидроцилиндрами привода их и одного неподвижного ножа, образующих между собой трехножевой режущий контур силового резания. На заднем кронштейне установлен фиксатор ствола. Сверху кронтейнов имеется проушина пальца штока гидроцилиндра выдвижной балки. Внутри выдвижной балки установлен двухходовой коллектор для подачи жидкости к гидроцилиндрам привода сучкорезных ножей и к фиксатору ствола. На верхнем листе выдвижной балки на винтах крепятся два постоянных магнита электрооборудования. Продольные конусные направляющие опираются на четыре конических катка, вращающихся на цапфах корпуса захвата.
Сучкорезные ножи предназначены для захвата поваленного дерева, срезания сучьев и подачи обработанного участка ствола в зону раскряжевочной пилы.
Каждый из подвижных сучкорезных ножей состоит из державки с проушиной и сучкорезного ножа, приваренного по вогнутой части державки. Сучкорезный нож изготовлен из тонколистового проката. Режущая кромка ножа имеет два угла заточки, а внутренняя сторона выполнена с обратным углом, обеспечивающим обрезку сучьев без зарезания ножа в древесину ствола.
Неподвижный нож состоит из державки и сучкорезного ножа с теми же углами заточки. Неподвижный нож пятью болтами крепится к лобовому листу кронштейна выдвижной балки. Гидроцилиндры сучкорезных ножей (рис. 4) установлены на пальцах внутри трубчатых чулков.
Фиксатор ствола предназначен для повышения точности отмера длин сортиментов за счет образования с сучкорезными ножами трехточечного контура в момент подачи ствола к пиле. В этом случае ствол удерживается прижимом подвижных сучкорезных ножей и зубчатой гребенкой фиксатора ствола. Для обеспечения автоматического режима работы фиксатор ствола гидравлически связан с поршневой полостью гидроцилиндров сучкорезных ножей.
Раскряжевочная цепная пила (рис. 4) предназначена для выпиливания сортиментов, проведения оторцовки комля, а также измельчения вершинной части для более удобной укладки ее на волок.
Пильная шина бензиномоторной пилы МП-5 "Урал" закреплена на привалочной плите балансира. Второе плечо балансира соединено пальцем со штоком гидроцилиндра надвигания пилы. В средней части балансира запрессована втулка, в которую входит цилиндрический прилив пальца челюсти захвата. Во внутренней расточке пальца два шарикоподшипника с валом, на одном конце которого на шлицах установлена ведущая звездочка цепи, а другой, через шпонку и втулку, соединен с валом гидродвигателя, находящегося в раструбе корпуса захвата. Привалочная плита балансира имеет внутренние сверления для подвода смазочной жидкости к цепи пилы, в пазе плиты установлена ступенчатая шпонка со шпилькой, с помощью которых закреплена пильная шина. На обратной стороне привалочной плиты в поперечном пазе имеются два электрических датчика. Монтаж цепи на шину и натяжка цепи осуществляются аналогично операциям, проводимым на бензиномоторной пиле МП-5 "Урал".
Ротатор предназначен для поворота сучкорезно - раскряжевочной головки в горизонтальной плоскости при наводке его на поваленное дерево, окучивании выпиливаемых сортиментов по длинам в местах их складирования, а также при укладке порубочных остатков на колею волока. Ротатор состоит из сварного корпуса, двух гильз, штока-рейки с поршнями, уплотненными манжетами и вала-шестерни.
Рама передняя – сварной конструкции, состоит из кронштейна, короба, проушин гидроцилиндров поворота машины и проушин крепления передней рамы через кронштейны к лонжеронам рамы трактора.
Задняя рама – сварной конструкции, состоит из двух лонжеронов и трех поперечин, образующих пространственную раму, корпуса, плиты, опоры и бампера.
Сучкорезно-раскряжевочная машина ЛО-126.Сучкорезно-раскряжевочная машина ЛО-126 предназначена для очистки от сучьев и раскряжевки деревьев хвойных и мягколиственных пород в основных лесозаготовительных районах со средним объемом хлыста от 0,35 до 0,80 м3 в условиях приречных нижних складов с молевым сплавом и на погрузочных пунктах лесовозных дорог.
Машина используется на грунтах с несущей способностью не ниже 80 кПа с уклонами не более 10° при скорости ветра до 15 м/с и глубине снежного покрова до 0,7 м.
Сучкорезно-раскряжевочная машина собрана на базе сучкорезной машины ЛП-33. В связи с установкой раскряжевочного устройства потребовалось изменение технологического оборудования машины ЛП-33. В частности, снята приемная головка, доработаны захват, гидравлическая система и электрооборудование.
Сучкорезно-раскряжевочная машина ЛО-126 (рис. 5) состоит из самоходного шасси (трактора ТТ-4) с установленной на нее опорой 1, несущей в вертикальной и горизонтальной плоскостях поворотную стрелу 2, по направляющим которой перемещается захват, протаскивающий дерево через ножи сучкорезной головки 3 при помощи лебедки.
На стреле смонтировано раскряжевочное устройство, включающее подвижную в продольном направлении цепную пилу и механизм отмера длины выпиливаемых сортиментов, состоящий из гидроцилиндра и штанги с упорами. Натяжное устройство 4, установленное на конце стрелы, служит для натяжения каната и надежного удержания дерева в захвате. Опора состоит из стойки, на которой размещена поворотная вокруг вертикальной оси колона с осью, предназначенная для установки стрелы.
Стрела представляет собой сварную балку коробчатого сечения, в нижней части которой имеются направляющие для захвата. По обоим концам стрелы расположены кронштейны с отверстиями для установки сучкорезной головки и натяжного устройства. К кронштейну стрелы крепится гидроцилиндр ее наклона.
Рис. 5. Сучкорезно-раскряжевочная машина ЛО-126
Сучкорезная головка (рис. 6) предназначена для захвата деревьев из пачки и обрезки с него сучьев в процессе протаскивания. Головка состоит из корпуса 5 сварной конструкции, рычагов 1 и 6 с ножами и верхнего ножа 8. Рычаги 1 и 6 установлены в корпусе на осях 2, соединены между собой для синхронного поворота тягой 3 и приводятся в действие гидроцилиндром 4. Верхний нож 8 размещен на оси 7.
Рис. 6. Сучкорезная головка
Раскряжевочное устройство состоит из цепной пилы и механизма отмера длины выпиливаемых сортиментов, включающего гидроцилиндр и штангу с подпружиненными упорами. Пила установлена на стреле подвижно и с помощью механизма отмера длины после остановки захвата с обрабатываемым деревом ориентируется относительно последнего, обеспечивая необходимую точную длину выпиливаемых сортиментов.
Захватное устройство предназначено для захвата и протаскивания обрабатываемого дерева через ножи сучкорезной головки и состоит из рамы, с установленными на осях зажимными рычагами, кинематически связанными между собой зубчатыми секторами. На одном из секторов с помощью рычага закреплен блок. Холостой канат крепится в барабане. Барабан снабжен храповиком и служит для регулировки длины канатной системы. Захват перемещается по стреле на катках. Тормоз удерживает захват на месте при срабатывании натяжного устройства, обеспечивающего раскрытие (с помощью пружин) или закрытие рычагов. Ограничителем захват упирается в комель ствола.
Натяжное устройство создает постоянное натяжение каната и обеспечивает надежное удержание дерева в захвате при изменении наклона стрелы.
В сучкорезно-раскряжевочной машине ЛО-126 использована кабина от сучкорезной машины ЛП-33. Кабина оборудована вентилятором, плафоном внутреннего освещения, термосом для аптечки, стеклоочистителями переднего и заднего окон, зеркалом заднего вида, противосолнечными щитками, звуковым сигналом, отопителем, приспособлением для обдува стекол. Имеется место для крепления огнетушителя. Рабочее место оператора оборудовано рычагами и пультом управления.
Лебедка предназначена для обеспечения возвратно-поступательного перемещения захвата по направляющим стрелы. Представляет собой двухступенчатый редуктор с двумя гидромоторами и барабаном 8. Две шестерни 2, установленные на выходных валах гидромоторов, через зубчатое колесо 3, шестерню 4 на валу 5 и зубчатое колесо 6 приводят во вращение вал 7, на внешнем конце которого закреплен барабан с винтовой канавкой для укладки каната. Реверсирование барабана осуществляется переключением золотника гидрораспределителя.
Гидросистема служит для привода в движение рабочих органов машины и состоит из двух контуров, имеющих бак с фильтрами, воздушным фильтром, магнитным улавливателем, датчиком температуры. Для заправки рабочей жидкости в бак через фильтр используется насос.
Для гидроцилиндров поворота и наклона стрелы, натяжного устройства и сучкорезной головки используются гидрораспределители с ручным управлением. Для управления гидроцилиндром механизма отмера длины применен гидрораспределитель с электромагнитами.
Перепускные клапаны, соединяющие напорные и сливные магистрали гидроцилиндров поворота и наклона стрелы, предохраняют последнюю от перегрузок. Для предохранения насосов и гидромоторов от перегрузки предусмотрены предохранительные клапаны.
В магистрали управления гидроцилиндром механизма отмера длины выпиливаемых сортиментов установлен дроссель к реле давления, при срабатывании которого отключается гидрораспределитель.
В состав электрооборудования сучкорезно-раскряжевочной машины ЛО-126 входят электрооборудование базовой сучкорезной машины ЛП-33 и система управления лебедкой и раскряжевочным устройством.
Порядок работы машины заключается в следующем. Оператор подводит машину к штабелю деревьев со стороны комлей и переводит стрелу из транспортного положения в рабочее (под прямым углом к продольной оси трактора). Наклоном и поворотом стрелы сучкорезная головка наводится на выбранное для обработки дерево. Захватив комель дерева боковыми ножами головки, оператор приподнимает его и поворотом стрелы в горизонтальной плоскости устанавливает ствол вдоль стрелы. При необходимости производится откомлевка. После отвода пилы в исходное положение раскрытый захват подается на комель дерева, включается рабочий ход лебедки, захват закрывается и протаскивает дерево на 1,5 м с тем, чтобы при повторном надвигании захвата на дерево ограничитель коснулся комля. В этом положении захват закрывается натяжным устройством. Заказав длину сортимента, оператор включает автоматический режим работы системы управления лебедкой и раскряжевочным устройством производит протаскивание дерева на длину сортимента, обрезку сучьев (тонкомерные деревья диаметром до 0,12 м подвергаются пролыске) и раскряжевку.
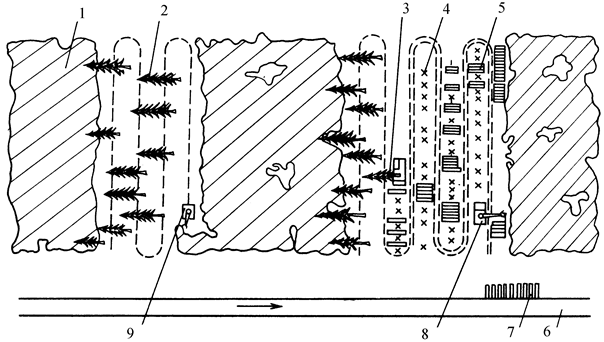
Сучкорезно-раскряжевочная машина ЛО-120.СРМ ЛО-120 смонтирована на базе сучкорезной машины ЛП-30В. Благодаря дополнительно установленной на стреле пиле производится раскряжевка хлыстов. Часовая производительность работы СРМ ЛО-120 при среднем объеме хлыста 0,25 м3 около 9,5 м3. Процессоры ЛО-120 применяются для получения сортиментов на волоке, приречных и верхних складах. На погрузочном пункте (верхнем складе) при их использовании деревья укладывают в штабель высотой около 1 м параллельно или перпендикулярно лесовозному усу. Пачки деревьев в штабель следует укладывать с расчетом на удобную и производительную работу процессора. Необходимо, в частности, пачки сбрасывать так, чтобы сучкорезно-раскряжевочная машина, двигаясь прямолинейно, могла свободно перемещаться рядом со штабелем в непосредственной близости от торцовой его части и взять все деревья, уложенные в штабель.
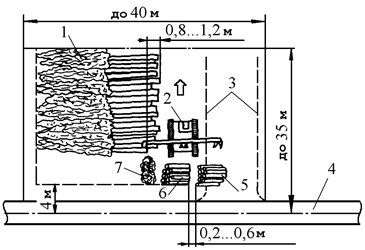
Для сокращения расстояний переездов манипуляторного лесо-погрузчика или самопогружающегося автопоезда при укладке пачек деревьев параллельно лесовозному усу глубину штабелей деревьев назначают в пределах до 30 м (рис. 7).
Машина, перемещаясь передним ходом, подъехав к штабелю деревьев, разворачивает стрелу с технологическим оборудованием перпендикулярно оси трактора. Позиция трактора относительно дерева, подлежащего обработке, характеризуется следующими средним размерами: расстояние от левой гусеницы до торца дерева 0,5 м; от комлевого торца до места захвата 3…3,5 м; расстояние от конца границы до дерева 1 м. В этом случае деревья в обработку захватываются как бы с некоторым опережением вперед по ходу машины. Стрела отклоняется от поперечного положения на угол 27° вперед, что позволяет разобрать штабель в пределах рабочей зоны без перемещения машины с одной стоянки на ширину до 2,5 м. Этим достигается хорошая видимость зоны с рабочего места машиниста, а дерево захватывают в месте, не закрытом обрезанными сучьями. С одной стоянки машина обрабатывает 12…15 деревьев.
Рис. 7. Схема расположения штабелей при работе процессора типа ЛО-120 на погрузочном пункте с перемещением от лесовозного уса: 1 – штабель деревьев; 2 – сучкорезно-раскряжевочная машина ЛО-120; 3 – зона установки самопогружающегося автопоезда при погрузке сортиментов; 4 – лесовозный ус; 5 – штабель тонкомерных сортиментов (d£14 см); 6 – штабель сортиментов из комлевой части (d³14 см; l=4…5,5 м); 7 – сучья и вершины
Захват комля дерева сучкорезными ножами, протаскивание его через них выполняют также как у сучкорезной машины ЛП-З0Б. К числу специфических для процессора ЛО-120 операций относятся, качественная оценка комлевой части ствола, отмер длины сортиментов с помощью упоров, закрытие захвата каретки, пиление, перенос и сброска сортимента в штабель. Для создания необходимого разрыва между штабелями сортиментов комель тонкомерного хлыста перемещают от сучкорезных ножей до отметки 3,8 м, затем подающая каретка возвращается к сучкорезной головке, после чего хлыст подают до упора и каретка оказывается около плоскости пропила. Удерживаемый захватами тонкомерный сортимент попадает в конец стрелы и сбрасывается во второй штабель.
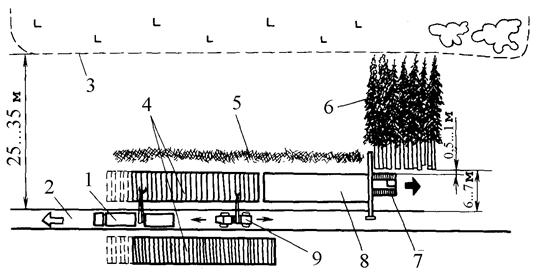
Также работает процессор ЛО-120 на погрузочном пункте, когда штабеля деревьев укладывают перпендикулярно лесовозному усу (рис. 8). При наличии манипуляторного погрузчика, обеспечивающего рассортировку и штабелевку сортиментов по размерно-качественным признакам, процессор выпиленные сортименты может сбрасывать и в один штабель. Манипуляторный лесопогрузчик (при отсутствии – форвардер) производит формирование штабелей по обе стороны лесовозного уса из рассортированных сортиментов.
В дальнейшем из этих штабелей отгружают сортименты на лесовозные автопоезда. Данную схему можно применять при создании сезонных запасов деревьев на лесосеках в тех случаях, когда заготовленную древесину вывозят только зимой по снежным или снежно-ледяным дорогам. Однако заготовку его можно вести и в летний период, используя вахтовый метод. В этих условиях к разрабатываемым лесосекам заранее намечают трассы лесовозных зимних дорог. Разработку лесосек при укладке деревьев (сортиментов) в запас начинают с разрубки трассы. Одновременно с разработкой выбирают ровные и сухие места и устраивают на них площадки для укладки штабелей. Штабеля деревьев укладывают перпендикулярно будущей дороге на расстоянии не менее 6…7 м от ее края, чем обеспечивается место для начала работы сучкорезно-раскряжевочной машины. Объем одного штабеля составляет 80...100 м3. Сучкорезно-раскряжевочная машина может работать как в период заготовки (если сроки хранения сортиментов невелики), так и в период вывозки.
Рис. 8. Схема расположения штабелей при работе процессора типа ЛО-120 на погрузочном пункте с перемещением вдоль лесовозного уса: 1 – самопогружающийся автопоезд; 2 – лесовозный ус; 3 – лесосека; 4 – штабеля рассортированных сортиментов; 5 – вал сучьев и вершинок; 6 – штабель деревьев; 7 – процессор; 8 – штабель нерассортированных сортиментов; 9 – манипуляторный лесопогрузчик
При всех описанных вариантах работы процессоров типа ЛО-120 на верхнем складе образуется вал из сучьев и вершинок по всей глубине штабеля деревьев. Его можно употребить на переработку (технологическую щепу, хвойно-витаминную муку и т.п.), а также для укрепления трелевочных волоков и лесовозных усов, перевозя к месту строительства машинами ЛП-23, ЛП-17, ЛТ-168 и другими.
Недостатками машин ЛО-120 является и то, что они не могут отсортировать более двух сортиментов и укладывать сортименты в штабеля высотой свыше 1,5 м без дополнительных штабелевочно-погрузочных машин. Часовая производительность при среднем объеме хлыста 0,25 м3 около 9,5 м3, среднее время цикла обработки одного дерева около 70…75 мин., в том числе: захват комля 14,2 с; откомлевка 1,7 м, раскряжевка и сброска сортимента в первый штабель – 16,4 с, во второй – 20,9 с. С учетом переездов и окучивания сортиментов среднее время обработки одного дерева на погрузочном пункте машиной близко к 80 с.
Сучкорезно-раскряжевочные машины, как показывает опыт Швеции, Беларуси и других регионов могут также работать на волоке в сочетании и с валочно-пакетирующими и валочно-трелевочными машинами. В качестве одной из схем разработки лесосеки валочно-пакетирующей машиной, процессором и форвардером может использоваться схема, представленная на рис. 9. Такая технология рекомендуется при сплошных рубках ВПМ ЛП-19А (ЛП-60 "Абакан"), использовании отечественных процессоров ЛО-120 (ЛО-125) и соответствующего сортиментовоза на колесной базе на грунтах с хорошей несущей способностью или при неглубоком снеге в зимний период.
Разработку лесосеки начинают с разрубки полосы шириной 30…50 м вдоль лесовозного уса. Валочно-пакетирующая машина перемещается при этом ходами, параллельными усу, но деревья укладывает перпендикулярно усу.
После ухода валочно-пакетирующей машины деревья должны быть обработаны сучкорезно-раскряжевочной машиной с полосы. Полоса необходима для маневрирования машин, улучшения обзорности, размещения штабелей сортиментов.
Разработав полосу вдоль лесовозного уса, валочно-пакетирующая машина начинает разработку основной части делянки. Разработку ведут сразу на всю глубину делянки – от уса до дальней ее границы. Возможны два варианта разработки делянок, лентами, параллельными усу и лентами перпендикулярными усу. Чередование разработки участков делают с таким расчетом, чтобы ВПМ всегда работала на безопасном расстоянии от сучкорезно-раскряжевочной машины и трелевщика сортиментов. Валочно-пакетирующая машина срезанные деревья укладывает перпендикулярно волоку, перемещаясь поочередно с одной ленты на другую. Деревья штабелюют в пачки, при этом возможна их подсортировка на две группы по породам (например, ель и береза с осиной). При разрубке первой ленты деревья могут укладывать на стену леса в просветы между стоящими деревьями.
Сучкорезно-раскряжевочная машина ЛО-120 двигается в направлении, обратном ходу валочно-пакетирующей машины ЛП-19А. С помощью стрелы и захвата она берет дерево за комель и протаскивает его на длину, соответствующую длине первого сортимента, затем протаскивающее устройство останавливают и включают пилу. При протаскивании дерева обрезают сучья. Выпиленные сортименты укладывают также перпендикулярно трелевочному волоку.
Со стороны сучкорезно-раскряжевочной машины, где она захватывает деревья, образуется вал сучьев, с противоположной стороны – ряд бревен.
Одной из особенностей рассматриваемой технологии является также сбор сучьев в валы одновременно с обработкой деревьев. Вал сучьев высотой до 1 м располагается в длину по всей лесосеке. Расстояние между валами будет зависеть от вылета стрелы и может достигать 10 м. Таким образом, параллельно с заготовкой сортиментов сучкорезно-раскряжевочная машина может очищать лесосеки и укреплять волоки. Возможна также отгрузка сучьев для последующего их использования при производстве топливной и технологической щепы. Сучья возможно эффективно использовать для выстилки волоков на сырых участках, для строительства лесовозных усов, а также укрепления места работы лесопогрузчиков.
Сортиментовоз (форвардер), двигаясь по волоку в сторону лесовозного уса, грузит сортименты с подсортировкой и затем транспортирует их к погрузочному пункту.
Сучкорезно-раскряжевочная машина ЛО-76 предназначена для работы на приречных складах, может быть также использована на верхних складах. Она производит обрезку сучьев и раскряжевку хлыстов диаметром до 0,75 м в комле, уложенных в штабель или пачки. Технологическое оборудование установлено на трелевочном тракторе ТТ-4.
В ряде зарубежных стран находят широкое применение многооперационные машины для заготовки сортиментов. Некоторые из них использовались на лесозаготовительных предприятиях нашей страны. Это финские валочно сучкорезно раскряжевочные машины "Lokomo-961", "Локомо-Макери", сучкорезно-раскряжевочные машины "Valmet-940GP", "Pika-75" и др.
Многооперационная машина "Lokomo-961" имеет колесное шасси, снабженное гидромеханической реверсивной трансмиссией. Рама шарнирно-сочлененная. Захватно-срезающее устройство расположено на конце гидроманипулятора и представляет собой цепной пильный механизм. Вылет гидроманипулятора – 8 м. Сучкорезный механизм состоит из трехножевой головки, ножа для обрезки вершин и протаскивающего устройства в виде горизонтально расположенных роликов. Раскряжевочное устройство позволяет выпиливать девять длин сортиментов и представляет собой дисковую пилу диаметром 1,2 м. Отмер длин сортиментов производится специальным роликом. С обеих сторон машины имеются лесонакопительные устройства. Их наличие позволяет осуществлять сортировку на три категории. Сброска сортиментов из лесонакопителей производится его опрокидыванием.
Сучкорезно-раскряжевочная машина "Valmet-940GP" грейферного типа выполнена на базе колесного трактора "Valmet-886K". Сучкорезно-раскряжевочный агрегат смонтирован на свободном конце манипулятора, максимальный вылет которого 7,5 м. Привод всех рабочих органов гидравлический. На СРМ имеется система, обеспечивающая обработку деревьев по заданной программе. Управление технологическим оборудованием производится из кабины оператора.
Практический интерес для Республики Беларусь представляет применение навесных сучкорезно-раскряжевочных устройств агрегатирующихся с сельскохозяйственными колесными тракторами или тракторами общего назначения. Фирма Niab выпускает навешиваемый на трехточечном устройстве трактора сучкорезно-раскряжевочный агрегат, ставший неотъемлемым элементом шведского лесного хозяйства.
Навесной процессор Niabсо ступенчатой подачей применяют как на рубках ухода, так и на рубках главного пользования. Он отличается низким уровнем производственных расходов и затрат на обслуживание. Наличие независимой гидравлической системы позволяет монтировать процессор на малых тракторах и тракторах устаревших моделей. Насос гидросистемы приводится в действие от вала отбора мощности трактора. Навесной процессор не повреждает древесину в процессе обработки и благодаря своей компактности и маневренности сохраняет почву и древостой.
На раме процессора монтируют лебедку с длиной каната 40 м и тяговым усилием 25 кН, предназначенную для подтрелевки поваленных деревьев в зону действия телескопической стрелы. Стрелу гидроцилиндром можно поворачивать как в вертикальной, так и горизонтальной плоскостях, что дает возможность использовать большое рабочее пространство. На одном конце стрелы крепят комбинированную захватно-сучкорезную головку, в средней части есть захват, удерживающий ствол в процессе обработки, на втором конце стрелы закреплена цепная пила, позволяющая распиливать хлысты диаметром до 35 см. Пульт управления технологическим оборудованием вынесен в безопасное место.
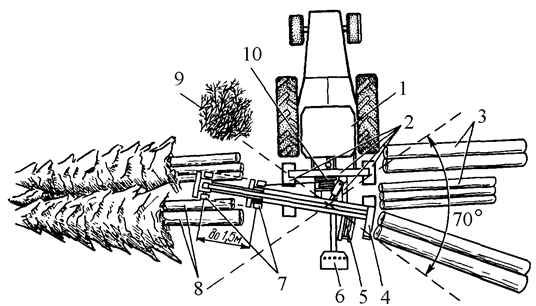
Работает процессор следующим образом (рис. 10.) По волоку (технологическому коридору) он перемещается задним ходом. Деревья на полупасеке валят перпендикулярно волоку бензиномоторной пилой. Для придания процессору устойчивости в зоне сваленных деревьев оператор опускает раму процессора на землю. Далее лебедкой подтрелевывают деревья. Подтрелевку стволов к процессору удобно проводить периодически. Оператор за один раз подтягивает около 20 стволов, а затем обрабатывает их, уже не покидая агрегата. Расстояние между волоками может достигать 80 м.
Деревья обрабатывают с одной стороны по ходу трактора от комля к вершине поштучно. Из подтрелеванной пачки захватно-сучкорезной головкой, имеющей ход 1,5 м, захватывают комель дерева и подают в зажимной рычаг. Им ствол удерживают в процессе ступенчатой обрезки сучьев при выдвижении телескопической балки (сучкорезных ножей). При обратном движении ножей-захватов зажимной рычаг ослабляют и хлыстовую часть ствола дерева подают в зону действия пилы. Раскряжевывают хлысты автоматической пилой с гидроприводом. Длина отрезаемых балансов отмеряется пропорционально числу ходов ступенчатой подачи (два хода соответствуют 3 м) при помощи градуированного аутригера.
За счет поворота стрелы обеспечивается раскладка сортиментов по размерно-качественным признакам. Образовавшиеся отходы в виде сучьев при работе машины с помощью захватно-сучкорезной головки формируют в вал. Закончив обработку подтрелеванной пачки деревьев, оператор переводит процессор в транспортное положение и перегоняет машину на новую технологическую стоянку. Далее цикл работ повторяется. При работе на погрузочном пункте процессор работает в режиме обрезка сучьев - раскряжевка, т.е. исключают операцию подтрелевки деревьев.
Аналогичным образом работает финский процессор-приставка Tuiko-300. Некоторое отличие заключается в том, что он имеет радиофицированный пульт управления и лебедку канатоемкостью 40 м, которой не только подтрелевывают деревья, но и подают его в процессорный узел машины. Общим для других финских процессорных приставок Pika 35, Pika 36, Pika 45, Nоkkа 350, Vimek-360 является наличие вальцевого механизма протяжки, цепной пилы, силовых ножей для обрезки сучьев и навесного манипулятора. Они просты, компактны, допускают поворот процессорного узла в горизонтальной плоскости свыше 200°, в вертикальной до 45°.
Технические характеристики сучкорезно-раскряжевочных машин приведены в табл. 1, а процессорных приставок Pika 35 и Nоkkа 350 в табл. 2.
Таблица 1.
Технические характеристики сучкорезно-раскряжевочных машин
Параметр
Марка машины
ЛО-115
ЛО-123
ЛО-126
Базовая машина
ВКС-160
МТЗ-80
ЛП-33
Мощность двигателя, кВт
81,1
Дорожный просвет, мм
Давление на грунт, кПа
Скорость движения, км/ч
0…27
1,89…17,95
2…15
Объем рабочей жидкости л
-
-
Производительность, м3/ч
Грузоподъемный момент загрузочного устройства, кН/м
-
-
Вылет загрузочного устройства, м
5,3…1,5
-
-
Угол поворота в горизонтальной плоскости, град, не менее:
сучкорезно-раскряжевочного стола
-
-
загрузочного устройства
-
-
захвата
-
Угол наклона технологического оборудования в вертикальной плоскости, град, не менее:
в направлении загрузки
-
-
в противоположном направлении
-
-
Диаметр обрабатываемого дерева, м:
0,06…0,50
0,04…0,40
0,06…0,50
Тяговое усилие протаскивающего устройства, кН
30…50
24…60
Скорость протаскивания дерева, м/с
2,0
0,5…1,2
1,7
Продолжительность технологического цикла обработки одного дерева, с
-
-
Максимальный диаметр срезаемых сучьев, м
0,15
0,08
-
Скорость пиления, м/с
18…13,2
-
Габаритные размеры в транспортном положении, мм
длина
ширина
высота
Эксплуатационная масса, кг
-
Масса навесного оборудования, кг
-
-
Таблица 2.
Техническая характеристика процессорных приставок
Параметр
Марка машины
Pika 35
Nokka 350
Масса, кг
Длина, м
Ширина, мм
Мощность расходуемая на привод технологического оборудования, кВт
50…60
Максимальный диаметр обрабатываемого ствола, см
Скорость протаскивания, м/с
3,5
Усилия протаскивания, кН
Диаметр вальцов, мм
Угол поворота, град:
в горизонтальной плоскости
в вертикальной плоскости
15…30
-
Производительность сучкорезно - раскряжевочных машин. Согласно основным положениям теории производительности, расчетная производительность СРМ может быть определена по формуле
,
где Vх – средний объем хлыста, м3; Тц – продолжительность цикла, сек.
Сменная производительность может быть найдена по формуле
,
где Тсм – продолжительность рабочей смены, ч; tр – регламентированные простои, ч/смена.
Таким образом, определение производительности машины сводится к расчету времени элементов цикла.
Для СРМ манипуляторного типа время цикла определяется по формуле
где tн, tз, tо, tр, tпер – соответственно затраты времени на наведение и доставку захватного устройства на поваленное дерево, зажим рычагов, обрезку сучьев и раскряжевку хлыстов, а также на переезд от одной технологической стоянки к другой в расчете на одно дерево.
Время на наведение и доставку захватного устройства можно определить по формуле
,
где R и r – максимальный и минимальный вылет манипулятора во время работы; vзу – скорость наведения захватного устройства, м/с.
Время на зажим дерева ЗУ зависит от величины раскрытия его зажимных рычагов Dзу, м, диаметра дерева в зоне зажима Dз, м, и скорости движения зажимных рычагов ЗУ (vз, м/с), и равно
.
Очистку стволов от сучьев можно осуществлять двумя способами. При первом способе, наиболее распространенном, происходит поочередное выполнение операции очистка сучьев – раскряжевка. Второй способ предусматривает сначала очистку от сучьев полностью всего ствола, а затем – раскряжевку.
Для первого случая
.
Для второго случая
,
где Н – длина хлыста, м; Нв – длина вершинки, м; v0 – средняя скорость протаскивания, м/с; v — средняя скорость протаскивания без обрезки (техническая паспортная скорость), м/с; ат — замедление при торможении процессора, м/с2
,
где lт – средний путь хлыста, проходимый при торможении процессора, м; k – коэффициент, учитывающий какую часть пути проходит процессор во время падения дерева (для СРМ k=1).
Зная средний диаметр пропила Dср, м, время на раскряжевку хлыста на сортименты определяют из выражения
где vр – скорость резания, м/с; nр – число резов.
,
где D1, D2, …, Dn – диаметры ствола в месте пропила, м.
Время на переезд с одной технологической стоянки на другую в расчете на одно дерево равно
,
где lпер – расстояние между смежными остановками машины, м; vм – средняя скорость перемещения машины, м/с; n – количество деревьев, обрабатываемых с одной стоянки.
Рекомендуемая литература:
1. А.В. Жуков, И.К. Иевинь, А.С. Федоренчик. Заготовка сортиментов на лесосеке. Технология и машины – М.: Экология, 1993, 312 с.
2. К.Ф. Гороховский, Н.В. Лившиц. Машины и оборудование лесосечных и лесоскладских работ – М.: Экология, 1991, 528 с.
Предисловие к новому изданию
Прошло около десяти лет с момента первой публикации “Космического триггера” издательством Энд/Ор Пресс и чуть позже — издательствомПокет Букс. Хотя ряд других моих романов продается лучше, но по двум параметрам я считаю эту книгу самой “успешной”.
1. С момента публикации вплоть до сегодняшнего дня я получил больше писем по “Космическому триггеру”, чем по любой другой моей книге, и большей частью эти письма написаны необычайно интеллигентными и свободомыслящими людьми. По какой-то причине многие читатели этой книги верят, что могут писать мне по-дружески и безбоязненно о вещах, которые в нашем обществе считаются официальными табу. Эти письма многому меня научили и помогли найти прекрасных новых друзей.
2. Во время лекционных турне мне всегда задают больше вопросов по этой книге, чем по всем остальным моим произведениям, вместе взятым.
Новое издание дает мне возможность ответить на вопросы, которые чаще всего задаются, и исправить типичные читательские ошибки в толковании прочитанного.
Все мыслящие читатели должны понимать (но, к удивлению, понимают не многие), что в этой книге я говорю с позиции агностицизма. Слово “агностик” открыто фигурирует в Прологе, агностическое отношение отчетливо прослеживается в самом тексте, но многие люди по-прежнему считают, что я “верю” в некоторые метафоры и модели, которые здесь использованы.
Поэтому хочу заявить еще отчетливей, чем прежде, что
Я НИ ВО ЧТО НЕ ВЕРЮ
Эту фразу, причем именно в такой формулировке, произнес редактор журнала “Нью Сайентист” Джон Гриббин во время телевизионных дебатов с мистером Маггериджем на канале Би-Би-Си, и многие зрители восприняли ее с недоверием.
Наверное, какой-то пережиток католического средневековья заставляет многих людей, даже образованных, считать, что каждый человек должен обязательно во что-то “верить”. Если он не ходит в церковь, то должен быть догматическим атеистом, а если он не считает капитализм совершенным, то должен пламенно веровать в социализм. То есть, если у него нет слепой веры в X, то в качестве альтернативы у него должна быть слепая вера в не-Х или в то, что противоположно X.
По моему личному мнению, вера — это смерть разума. Как только человек начинает верить в доктрину того или иного рода и перестает сомневаться, он прекращает размышлять об этом аспекте бытия. Чем большей уверенностью он проникается, тем меньше у него остается пищи для размышлений. Ни в чем не сомневающийся человек никогда не испытывает потребности думать, и его можно считать клинически мертвым по всем медицинским стандартам, ибо прекращение деятельности мозга свидетельствует о наступлении смерти.
Я полностью разделяю точку зрения д-ра Гриббина и большинства современных физиков. Их позиция, известная в физике как “Копенгагенская Интерпретация”, сформулирована в Копенгагене д-ром Нильсом Бором и его сотрудниками в 1926–1928 гг. Копенгагенская Интерпретация, порой именуемая “моделью агностицизма”, утверждает, что какой бы системой мы ни пользовались для упорядочения наших знаний о мире, эта система остается моделью мира, которую не следует путать с самим миром. Семантик Альфред Кожибский пытался популяризировать этот постулат среди нефизической общественности лозунгом: “Карта — это не территория”. Алан Уотс, талантливый экзегет восточной философии, перефразировал это высказывание еще сочнее: “Меню — это не еда”.
Вера в традиционном смысле — или уверенность, или догма — ведет к колоссальному заблуждению. “Моя текущая модель, или система, или карта, или туннель реальности, — полагает человек, — вмещает всю вселенную, и у меня нет необходимости когда-нибудь ее пересматривать”. Вся история развития науки и знания в целом опровергает эту абсурдную и высокомерную точку зрения, но, как ни странно, подавляющее большинство людей все еще придерживаются таких средневековых взглядов.
В “Космическом триггере” описывается процесс сознательного стимулирования изменения мозга, которым я занимался в 1962–1976 гг. Во многих традиционных обществах этот процесс называется “инициацией”. Используя современную терминологию, его можно с легкостью назвать опасной разновидностью аутогенной психотерапии.
Я настоятельно не рекомендую такую практику всем и каждому, потому что мне удалось добиться скорее хороших, чем плохих результатов главным образом из-за того, что:
а) перед отправлением в это рискованное путешествие я уже прошел два разных курса обычной психотерапии,
б) у меня была хорошая научно-философская подготовка,
в) вообще я не склонен слишком буквально “верить” в любые поразительные Откровения.
Коротко говоря, самое главное, что я уяснил в ходе моих экспериментов, состоит в следующем: “реальность” всегда множественна и изменчива. Поскольку в “Космическом триггере” я занимался как раз объяснением и иллюстрированием этого факта, а также пытался объяснить это снова в других книгах, но по-прежнему сталкиваюсь с людьми, которые прочитали все мои сочинения на эту тему, но все еще не понимают, что я имею в виду.
В этом новом Предисловии я вновь попробую объяснить это ЕЩЕ РАЗ, возможно, более доходчиво, чем раньше.
Так уж получилось, что в английском (и русском) языке слово “реальность” — этосуществительное в единственном числе. Поэтому сам процесс мышления на английском языке (и на родственных ему индоевропейских языках) подсознательно “программирует” нас на представление “реальности” в виде одного многоквартирного дома, похожего на гигантский нью-йоркский небоскреб, в котором каждая часть — это просто другая “комната” в том же самом здании. Эта лингвистическая программа сидит в нас настолько глубоко, что большинство людей вообще не могут “размышлять” за ее пределами, а если кто-то пытается предложить совершенно иной взгляд на мир, им кажется, что он мелет чушь.
Представление, что “реальность” — это существительное вроде монолитной глыбы или бейсбольной биты, обязано своим происхождением тому эволюционному факту, что наши нервные системы обычно преобразуют потоки энергии в такие вот блочные “предметы”, видимо, в качестве непосредственных биовыживательных сигналов. Такие “предметы”, впрочем, растворяются обратно в потоки энергии — процессы, илиглаголы, — когда активность нервной системы усиливается под влиянием определенных наркотиков, либо трансмутируется йогическими или шаманскими упражнениями, либо поддерживается с помощью научных инструментов. В целом, мистики и физики сходятся во мнении, что “предметы” конструируются нашими нервными системами и что “реальности” (множественные) лучше описывать в виде систем или энергетических пакетов.
Но довольно о “реальности” как о “существительном”. Представление, что “реальность” единственна, словно это герметично запечатанный кувшин, не вписывается в научные открытия этого столетия, согласно которым “реальность” лучше представлять текучей и извилистой, как река, или взаимодействующей, как игра, или эволюционирующей, как сама жизнь.
Большинство философов по меньшей мере с пятого века до нашей эры знают, что мир, воспринимаемый нашими органами чувств, — это не “реальный мир”, а конструкция, которую мы создаем. Наше собственное произведение искусства.
Современная наука началась с эксперимента Галилея, который продемонстрировал, что цвет содержится не в объектах, а во взаимодействии наших органов чувств с объектами.
Несмотря на философское и научное знание нейрологической относительности, которая по мере совершенствования аппаратуры проявляется все отчетливее, из-за особенностей языка мы по-прежнему считаем, что за текучей, извилистой, взаимодействующей и эволюционирующей вселенной, — детищем нашего восприятия, — скрывается единая незыблемая монолитная “реальность”, резко и четко очерченная, словно металлический кубик.
Квантовая физика разрушила эту платоновскую “реальность”, показав, что с научной точки зрения имеет больше смысла говорить лишь о взаимодействиях, которые мы на самом деле ощущаем (наши операции в лаборатории); а психология восприятия добила эту монолитную “реальность”, когда показала, что, признав ее существование, мы придем к неразрешимым противоречиям при попытке объяснить, как человек на самом деле отличает гиппопотама от симфонического оркестра.
Единственные “реальности” (множественное число), которые мы на самом деле ощущаем и можем осмысленно обсуждать, — это воспринимаемые нами реальности, которые мы переживаем, т. е. экзистенциальные реальности. Эти реальности содержат нас самих в качестве редакторов, и все они связаны с наблюдателем.
Они способны флуктуировать, эволюционировать, расширяться и обогащаться, переходить от низкого разрешения к высокому, но они не совмещаются друг с другом, как мозаичные фрагменты, и не собираются в одну единую Реальность с заглавной буквы Р. Скорее они выгодно оттеняют друг друга, играя на контрасте, как картины в огромном музее или различные симфонические стили Гайдна, Моцарта, Бетховена и Малера.
Возможно, лучше всего об этом сказал Алан Уотс: “Вселенная — это гигантская чернильница Роршаха”.
В восемнадцатом веке наука придает ей одно значение, в девятнадцатом — другое, а в двадцатом — третье; каждый художник видит уникальные значения на разных уровнях абстракции; а все мужчины и все женщины видят каждый свое в разное время суток — в зависимости от внутреннего состояния и внешних обстоятельств.
В этой книге описывается то, что я называю “стимулированным изменением мозга”, а д-р Джон Лилли более звучно называет “метапрограммированием человеческого биокомпьютера”.
Говоря простым языком, я, как психолог и романист, решил выяснить, насколько быстро можно преобразовать мозговую деятельность одного-единственного нормального одомашненного примата среднего ума. Единственным человеком, на котором я мог проводить такой этически рискованный эксперимент, естественно, был я сам.
Подобно большинству людей, которые исторически пытались выполнить подобное “метапрограммирование”, я вскоре попал в метафизическую ловушку. Стало совершенно очевидно, что мои предыдущие модели и метафоры не в состоянии объяснить то, что я переживал. Поэтому по ходу развития событий мне приходилось изобретать новые. А поскольку я имел дело с вопросами, выходившими за пределы общесогласованных, или консенсусных туннелей реальности, некоторые из моих метафор звучат довольно необычно. Лично меня это не очень смущает, поскольку я не только психолог, но и художник. Но меня очень смущает, когда люди воспринимают эти метафоры слишком буквально.
Прошу тебя, благосклонный читатель, запомни цитату из Алистера Кроули, приводимую в начале Части Первой, и мысленно повторяй ее себе всякий раз, когда на каком-то этапе вдруг засомневаешься, а не подсовываю ли я тебе новейшие теологические откровения из Космического Центра.
Мои личные эксперименты демонстрируют (так же, как и все подобные эксперименты в истории) только то, что наши модели “реальности” весьма миниатюрны и упорядоченны, а подопытная вселенная — необъятна и беспорядочна. И ни одна модель никогда не сможет вобрать в себя всю необъятную беспорядочность, которую воспринимает незашоренное сознание.
Как мне кажется (вернее, как я надеюсь), данные моих экспериментов доказывают, что нейрологическая модель агностицизма — эдакое применение Копенгагенской Интерпретации к человеческому сознанию, — позволяет человеку освободиться от определенных ограничений механических эмоций и роботического процесса мышления, которые неизбежны, пока человек остается в рамках одной догматической модели или одного импринтированного туннеля реальности. Что касается лично меня, то я считаю (или предполагаю, или интуитивно чувствую), что наиболее нетрадиционные из моих моделей, которые здесь приведены, — модели, подразумевающие существование Высшего Разума в виде каббалистического ангела-хранителя или пришельцев с Сириуса, — это необходимые рабочие инструменты на определенных стадиях процесса метапрограммирования.
Другими словами, независимо от того, существуют такие сущности где-нибудь за пределами нашего собственного воображения или нет, многие способности нашего мозга останутся тайной за семью замками, если мы не воспользуемся подобными “ключиками”, которые отпирают эти замки. Но я на этом не настаиваю; это просто мое личное мнение.
По-видимому, некоторым людям удается пересечь Гибельное Место без индивидуальных “проводников”. Я даже знаю одного парня, который представлял “суперкомпьютер из будущего”, посылавший его мозгу информацию обратно в прошлое. Более умные люди находят менее “метафизические” метафоры.
Через десять лет после написания этой книги меня не очень волнуют эти домыслы. Наши одинокие маленькие “я” могу т быть “озарены” или залиты радикальной научно-фантастической информацией и космическими перспективами, а их источником могут быть или инопланетяне, или тайные вожди суфизма, или парапсихологи и (или) компьютеры двадцать третьего столетия, посылающие сигналы обратно во времени. Или все это — дело “рук” ранее бездействовавших участков нашего собственного мозга.
В этой связи меня часто спрашивают о двух книгах других авторов, которые удивительно резонируют с “Космическим триггером”, — я имею в виду книгу Филипа К. Дика “ВАЛИС” и книгу Дорис Лессинг “Сирианские эксперименты”. “ВАЛИС” — роман, в котором сквозят явные намеки на то, что это не просто роман, а фактический отчет о личном опыте общения Филипа Дика с некой формой “Высшего разума”.
В сущности, “ВАЛИС” только слегка беллетризирован; об истинных событиях, положенных в основу книги, рассказывается в длинном интервью, которое Фил дал незадолго до своей смерти. Аналогии с моим собственным опытом многочисленны, — но столь же многочисленны и расхождения.
Я встречался с Филипом Диком два или три раза и немного с ним переписывался. По-моему, его тревожило, не был ли этот опыт общенияпроявлением его временной невменяемости, поэтому он настойчиво пытался выяснить, вменяем ли я. Я так и не

 ,
, ,
,
 ,
, .
. .
. ,
, ,
,
 ,
, ,
,