Количественными мерами помехоустойчивости передачи системы с ИКМ являются среднеквадратическое отклонение(СКО) принятого сигнала от преданного или отношение сигнал-шум на выходе ЦАП.
Причинами, приводящими к отличию принятого сигнала от переданного при ИКМ, являются:
· Шум квантования, возникающий из-за округления мгновенных значений отсчетов до ближайших разрешённых уровней квантования;
· Помехи в канале, вызывающие ошибки при демодуляции сигналов кодовых комбинаций.
Шум квантования возникает в АЦП и не связан с помехами в канале. Средняя мощность шума квантования Рш.кв определяется как дисперсия случайной погрешности квантования (9.1). при большом числе уровней квантования L можно считать, что погрешность квантования имеет равномерное распределение вероятности с плотностью.
; (9.2)
Тогда средняя мощность шума квантования будет равна:
. (9.3)
Отношение средних мощностей сигнала и шума квантования с учетом коэффициента амплитуды сигнала определяется как [2]
, (9.4)
где umax- максимальное значение сигнала u(t); -коэффициент амплитуды сигнала.
Если выразить шаг квантования D через число уровней L, пологая, что сигнал U(t) симметричен т.е. |umax| = |umin|, то
, (9.5)
Подставляя (9.5) в (9.4), получим:
, (9.6)
где n- число символов кода на отсчёт (разрядность двоичного кода);
- пик-фактор сигнала (сообщения). Полагая, что сообщение нормировано и |u(t)|max=1, получаем [1]
. (9.7)
Из полученных выражений следует, что шум квантования полностью определяется шагом квантования D, который зависит от числа уровней L. Подбирая число уровней квантования n, соответственно, разрядность кода n, можно получить любую наперёд заданную величину отношения сигнал-шум квантования.
В табл. 9.1 приведена зависимость отношения Рс/Рш.кв от числа уровней квантования при равномерном распределении нормированного сообщения w(a) = 0,5 (-1<a<1), когда [1].
Таблица 9.1.
Число уровней квантования
Число символов в кодовой комбинации n
Относительная мощность шума квантования – 20lg (L-1), дб
-16,9
-23,5
-29,8
-36,0
-42,1
-48,1
-54,2
-60,2
-66,2
Из табл. 9.1 следует, что добавление каждого двоичного символа в кодовой комбинации, т.е. увеличение разрядности кода улучшает отношение сигнал-шум примерно на 6 дБ, т.е. в 4 раза. С другой стороны, увеличение разрядности требует повышения быстродействия многоразрядных кодирующих устройств, а также соответствующего расширения полосы частот канала передачи. См также [2], с. 285-286, пример 16.3.
Если распределение сообщения не является равномерным, то необходимо внести поправки. Для этого данные табл. 9.1 следует уменьшить по модулю на 20 lg , дБ. При П = 3 (телефонные сообщения) это составляет 4,8 дБ, а при П = 10 (симфоническая музыка) – 15,5 дБ.
Важной особенностью шума квантования, отличающего его от аддитивного шума, является то, что он имеется только при наличии сигнала U(t). Нет сигнала, нет и шума квантования. Этот шум можно рассматривать как разновидность нелинейных искажений, возникающих в процессе квантования. Поэтому шум квантования не изменяется при ретрансляции сигналов и не накапливается в канале связи. Его непосредственное изменение затруднительно, и поэтому для количественной оценки используют расчетные формулы, приведённые выше или аналогичные им.
Шум ложных импульсов при декодировании.Ошибки при приеме символов кодовой комбинации из-за помех в канале связи, если не предусмотрены меры по их исправлению, приводят к ошибочному декодированию всей кодовой комбинации. Это означает, что переданный квантованный отсчёт на выходе декодера ЦАП заменяется другим отсчётом (не обязательно ближайшем по уровню). Возникающая при этом погрешность восстановления отсчетов называется шумом ложных импульсов. Она обычно зависит от того, какие из символов кодовой комбинации приняты ошибочно, т.е. от места ошибки.
Если в ИКМ используется натуральный двоичный код, то ошибка в первом (младшем) разряде кодовой комбинации вызывает погрешность, равную шагу квантования D, ошибка в i - м разряде приводит к появлению в выходном сигнале погрешности . Множитель является «весовой» функцией при определении мощности шума ложных импульсов. При этом средняя мощность шума ложных импульсов [1]
, (9.8)
где р – вероятность ошибочного приёма одного символа кодовой комбинации.
При фиксированном значении n = шум ложных импульсов зависит только от вероятности ошибок р, которая, в свою очередь, определяется отношением мощностей сигнала и помехи в канале и видом модуляции.
В отличие от шума квантования шум ложных импульсов накапливается при ретрансляции сигналов. Слабый шум ложных импульсов, при Рош > воспринимается в телефонном канале как редкие отдельные щелчки, при Рош > щелчки становятся частыми и сливаются в сплошной шумовой фон, соизмеримый с шумом квантования. Однако в правильно спроектированных системах с ИКМ мощность сигнала превышает пороговую, при котором шумом ложных импульсов по сравнению с шумом квантования можно пренебречь. При этом условии верность приёма практически определяется шумом квантования и может быть сколь угодно большой, если число квантования достаточно большое.
Методы повышения помехоустойчивости ИКМ. Высокая помехоустойчивость ИКМ получается за счёт расширения спектра ИКМ сигнала. Естественным методом уменьшения шума квантования является увеличение числа уровней квантования. Однако при этом увеличивается разрядность кода и расширяется спектр ИКМ сигнала. Так, увеличение L в 2 раза приводит к увеличению ширины спектра сигнала в log22L/log2L раз. Из этого следует что, система с ИКМ, как и в помехоустойчивых системах с аналоговой модуляцией, например ЧМ, происходит «обмен» отношения сигнал-шум на полосу частот. Но поскольку полоса частот расширяется по логарифмическому закону, а отношение сигнал-шум квантования возрастает по показательному закону, в системе с ИКМ этот обмен происходит более эффективно, чем в системах с аналоговой модуляцией. По этому показателю в настоящее время не существует систем модуляции лучше, чем ИКМ.
Влияние шумов квантования можно заметно уменьшить, применив неравномерный шаг квантования. Низкие уровни сигнала квантуются с малым шагом, большие уровни квантуются с большим шагом. Такое квантование позволяет при том же числе уровней квантования L передавать слабые сигналы с меньшей погрешностью.
Практически неравномерное квантование реализуется в так называемых компандерных системах. Компандированием называют сжатие динамического диапазона сигналов при передаче и расширение при приеме. Компандерная система представляет собой комплекс из двух нелинейных преобразователей с взаимно-обратными характеристиками (рис. 9.5) компрессора (устройства "сжатия" динамического диапазона, устанавливается на передающей стороне) и экспандера (устройства восстановления динамического диапазона сигнала).
Суммарная характеристика системы компрессор-экспандер линейная. Увеличение отношения сигнал-шум квантования при применении компрессирования (нелинейного квантования ) определяется степенью уменьшения коэффициента амплитуды и может достигать 10...20 дБ, что эквивалентно уменьшению разрядности кода на 2…3 разряда.
И, наконец, для уменьшения шума ложных импульсов в первую очередь необходимо снижать вероятность ошибки элементов кодовых комбинаций, т.е. применять более помехоустойчивые виды модуляции и кодирования. В связи с этим в помехоустойчивых системах с ИКМ применятся код Грея или симметричный код, дающие большую защищенность системы с ИКМ от ошибок (см. [2], c. 283-284 ).
9.4. Дельта модуляция
Рис. 9.6. Графики, поясняющие принцип формирования сигналов ДМ: а - исходный сигнал u(t);
б -последовательность импульсов ДМ сигнала; в-квантованный и принятый непрерывный сигнал
Дельта-модуляция (ДМ) была предложена с целью упрощения АЦП и ЦАП. При преобразовании аналогового сигнала в цифровой в АЦП дельта - модулятора используется одноразрядный код, символ которого определяет только полярность (знак) производной аналогового сигнала через интервал дискретизации Тд. Принцип формирования сигнала ДМ показан на рис. 9.6
На участках 0…t1, t2…t3 аналоговый сигнал u(t) возрастает (производная du(t)/dt положительная), поэтому кодовые символы ДМ сигнала принимают значения +1 и на рис. 9.6,б они изображены как импульсы положительной полярности. На участке t1…t2 сигнал u(t) убывает (производная отрицательна), кодовые символы ДМ сигнала принимают значения -1 и изображены в виде импульсов отрицательной полярности. Поскольку ДМ сигнал получается как знак производной аналогового сигнала, то для преобразования последовательности импульсов в аналоговый сигнал необходимо выполнить операцию, обратную дифференцированию, т.е. интегрирование. Если на вход идеального интегратора ЦАП подавать последовательность импульсов ДМ сигнала, то выходное напряжение будет иметь вид ступенчатой функции uкв(kTд) с постоянным шагом ∆ (рис. 9.6,в). Эта ступенчатая функция и является аппроксимацией аналогового сигнала. Восстановление аналогового сигнала uпр(t) из квантового uкв(kТд) осуществляется, как и в ЦАП ИКМ, фильтром нижних частот (рис. 9.7).
Для получения приращения (производной) аналогового сигнала применяются вычитающее устройство ВУ, на один вход которого подается непрерывный сигнал u(t), на второй вход - восстановленный интегратором и квантованный сигнал - uкв(kТд). Разностный сигнал е(t) = u(t) -uкв(kТд) и является аппроксимированной производной сигнала u(t). Функцию квантователя выполняет пороговое устройство ПУ, напряжение на входе которого соответствуют знаку разностного сигнала e(t). Электронный ключ Кл замыкается через интервал дискретизации Тд, на выходе его формируется двуполярная последовательность импульсов ДМ сигнала.
Такой способ получения ДМ сигнала называется линейной (классической) дельта-модуляцией. В настоящее время существуют десятки разновидностей ДМ, отличающихся, в основном, способом передачи с предсказанием (предсказателем). Так как в ДМ разностный сигнал формируется из входного и предсказанного тем или иным способом, ее часто называют системой с предсказанием [1,2].
Особенности ДМ. Непрерывный сигнал uпр(t) при ДМ лишь с некоторым приближении воспроизводит исходный сигнал u(t). Точность воспроизведения зависит от частоты дискретизации, шага квантования, а также от крутизны сигнала. Очевидно, что для уменьшения шума квантования необходимо, как и в ИКМ, уменьшать шаг квантования ∆. Но уменьшение шага ступенчатой кривой (см. рис.9.6,в) требует такого же увеличения частоты дискретизации, иначе ступенчатая кривая не будет совпадать с непрерывной. Однако шаг квантования ∆ нельзя брать слишком малым, так как в противном случае возникают дополнительные специфические искажения, называемые перегрузкой по крутизне [2, 3], вызванные тем, что ступенчатая функция не успевает следить за быстрыми изменениями непрерывного сигнала. Одним из способов борьбы с перегрузкой по крутизне является применение переменного шага квантования: с увеличением крутизны увеличивается шаг квантования (адаптивная ДМ).
По сравнению с ИКМ сигналы ДМ имеют значительно более высокую частоту дискретизации. В ДМ частота дискретизации определяется не по теореме Котельникова, а исходя из заданной точности воспроизведения непрерывного сигнала. Расчёты показывают [2], что при одинаковом с ИКМ шуме квантования частота дискретизации при ДМ примерно на порядок выше fддм ≈ 20Fмакс. Однако скорость модуляции цифрового сигнала в ДМ и ИКМ примерно одинакова, так как в ДМ используется одноразрядный код, а в ИКМ - n - разрядный. При одинаковой помехоустойчивости частота следования импульсов при ИКМ и ДМ также примерно одинакова. Поэтому обе эти системы занимают приблизительно одинаковую полосу частот.
Существенным преимуществом систем передачи с ДМ является сравнительная простота кодирующих и декодирующих устройств. Кроме того, шум ложных импульсов при ДМ меньше, чем при ИКМ (при той же вероятности ошибки в канале), так как при ДМ каждая ошибка изменяет уровень сигнала только на D. К недостаткам ДМ можно отнести явление размножения ошибок, создаваемых ложными импульсами, поскольку в схеме ДМ используется идеальный интегратор, обладающий бесконечной памятью, что приводит к накоплению ошибок. Для борьбы с этим явлением на практике либо периодически разрежают интегратор до нуля, либо используют интегратор, имеющий ограниченную постоянную времени.
Передача цифровых сигналов по линиям связи.Цифровой сигнал на выходе АЦП ИКМ представляет собой последовательность однополярных импульсов длительностью Тд, соответствующих передаче "1" и паузы соответствующей "0". Двухполярные короткие импульсы ДМ для уменьшения ширины их спектра также преобразовываются однополярные. Спектральная плотность мощности этой случайной последовательности импульсов теоретически равна бесконечности, но её основная часть расположена в пределах от нуля до fд. Если сопоставить этот спектр с АЧХ реальных радио и кабельных линий связи, то можно обнаружить их значительное несоответствие. Линии радиосвязи имеют примерно постоянную АЧХ в полосе частот, симметричной относительно несущей частоты. Кабельные линии связи с включенными в них усилителями и регенераторами дают значительное ослабление в области низких и высоких частот. Поэтому для устранения искажений цифрового сигнала из-за несоответствия его спектра и АЧХ линии связи применяют дополнительное преобразование цифрового сигнала.
В линиях радиосвязи (радиорелейных, спутниковых и др.) применяют различные виды вторичной частотной или фазовой манипуляции. При некогерентном приёме манипулированного сигнала предпочтение отдают ЧМн, при когерентном приеме – ОФМн.
В кабельных линиях связи широко распространена передача сигналов двухуровневыми импульсами постоянного тока. Длительность импульсов уменьшается до половины интервала дискретизации и применяется специальное линейное кодирование. Простейшим из кодов линии является квазитроичный код с чередованием полярности импульсов (ЧПИ).
Преобразование исходного однополярного цифрового сигнала в код ЧПИ показано на рис. 9.8. Оно заключается в перемене полярности каждого последующего импульса на противоположную по отношению к предыдущему. Постоянная составляющая в спектре такой последовательности импульсов отсутствует, а основная энергия спектра сосредоточена в области тактовой частоты fд и согласуется с АЧХ кабельной линии.
Основным недостатком кода с ЧПИ является трудность выделения тактовой частоты при длительной передаче нулей, поэтому применяют другие коды линии, различающиеся способом ограничения числа следующих подряд нулей.
Исторически получилось так, что рассмотренные аналого-цифровые преобразования называют модуляцией. По существу, это двоичное кодирование непрерывного сигнала. Более точно называть преобразование в АЦП и ЦАП кодированием и декодированием.

 ; (9.2)
; (9.2) . (9.3)
. (9.3) , (9.4)
, (9.4) -коэффициент амплитуды сигнала.
-коэффициент амплитуды сигнала. , (9.5)
, (9.5) , (9.6)
, (9.6) - пик-фактор сигнала (сообщения). Полагая, что сообщение нормировано и |u(t)|max=1, получаем [1]
- пик-фактор сигнала (сообщения). Полагая, что сообщение нормировано и |u(t)|max=1, получаем [1] . (9.7)
. (9.7) [1].
[1]. , дБ. При П = 3 (телефонные сообщения) это составляет 4,8 дБ, а при П = 10 (симфоническая музыка) – 15,5 дБ.
, дБ. При П = 3 (телефонные сообщения) это составляет 4,8 дБ, а при П = 10 (симфоническая музыка) – 15,5 дБ. . Множитель
. Множитель  является «весовой» функцией при определении мощности шума ложных импульсов. При этом средняя мощность шума ложных импульсов [1]
является «весовой» функцией при определении мощности шума ложных импульсов. При этом средняя мощность шума ложных импульсов [1] , (9.8)
, (9.8) шум ложных импульсов зависит только от вероятности ошибок р, которая, в свою очередь, определяется отношением мощностей сигнала и помехи в канале и видом модуляции.
шум ложных импульсов зависит только от вероятности ошибок р, которая, в свою очередь, определяется отношением мощностей сигнала и помехи в канале и видом модуляции. воспринимается в телефонном канале как редкие отдельные щелчки, при Рош >
воспринимается в телефонном канале как редкие отдельные щелчки, при Рош >  щелчки становятся частыми и сливаются в сплошной шумовой фон, соизмеримый с шумом квантования. Однако в правильно спроектированных системах с ИКМ мощность сигнала превышает пороговую, при котором шумом ложных импульсов по сравнению с шумом квантования можно пренебречь. При этом условии верность приёма практически определяется шумом квантования и может быть сколь угодно большой, если число квантования достаточно большое.
щелчки становятся частыми и сливаются в сплошной шумовой фон, соизмеримый с шумом квантования. Однако в правильно спроектированных системах с ИКМ мощность сигнала превышает пороговую, при котором шумом ложных импульсов по сравнению с шумом квантования можно пренебречь. При этом условии верность приёма практически определяется шумом квантования и может быть сколь угодно большой, если число квантования достаточно большое. Суммарная характеристика системы компрессор-экспандер линейная. Увеличение отношения сигнал-шум квантования при применении компрессирования (нелинейного квантования ) определяется степенью уменьшения коэффициента амплитуды и может достигать 10...20 дБ, что эквивалентно уменьшению разрядности кода на 2…3 разряда.
Суммарная характеристика системы компрессор-экспандер линейная. Увеличение отношения сигнал-шум квантования при применении компрессирования (нелинейного квантования ) определяется степенью уменьшения коэффициента амплитуды и может достигать 10...20 дБ, что эквивалентно уменьшению разрядности кода на 2…3 разряда. И, наконец, для уменьшения шума ложных импульсов в первую очередь необходимо снижать вероятность ошибки элементов кодовых комбинаций, т.е. применять более помехоустойчивые виды модуляции и кодирования. В связи с этим в помехоустойчивых системах с ИКМ применятся код Грея или симметричный код, дающие большую защищенность системы с ИКМ от ошибок (см. [2], c. 283-284 ).
И, наконец, для уменьшения шума ложных импульсов в первую очередь необходимо снижать вероятность ошибки элементов кодовых комбинаций, т.е. применять более помехоустойчивые виды модуляции и кодирования. В связи с этим в помехоустойчивых системах с ИКМ применятся код Грея или симметричный код, дающие большую защищенность системы с ИКМ от ошибок (см. [2], c. 283-284 ). 9.4. Дельта модуляция
9.4. Дельта модуляция На участках 0…t1, t2…t3 аналоговый сигнал u(t) возрастает (производная du(t)/dt положительная), поэтому кодовые символы ДМ сигнала принимают значения +1 и на рис. 9.6,б они изображены как импульсы положительной полярности. На участке t1…t2 сигнал u(t) убывает (производная отрицательна), кодовые символы ДМ сигнала принимают значения -1 и изображены в виде импульсов отрицательной полярности. Поскольку ДМ сигнал получается как знак производной аналогового сигнала, то для преобразования последовательности импульсов в аналоговый сигнал необходимо выполнить операцию, обратную дифференцированию, т.е. интегрирование. Если на вход идеального интегратора ЦАП подавать последовательность импульсов ДМ сигнала, то выходное напряжение будет иметь вид ступенчатой функции uкв(kTд) с постоянным шагом ∆ (рис. 9.6,в). Эта ступенчатая функция и является аппроксимацией аналогового сигнала. Восстановление аналогового сигнала uпр(t) из квантового uкв(kТд) осуществляется, как и в ЦАП ИКМ, фильтром нижних частот (рис. 9.7).
На участках 0…t1, t2…t3 аналоговый сигнал u(t) возрастает (производная du(t)/dt положительная), поэтому кодовые символы ДМ сигнала принимают значения +1 и на рис. 9.6,б они изображены как импульсы положительной полярности. На участке t1…t2 сигнал u(t) убывает (производная отрицательна), кодовые символы ДМ сигнала принимают значения -1 и изображены в виде импульсов отрицательной полярности. Поскольку ДМ сигнал получается как знак производной аналогового сигнала, то для преобразования последовательности импульсов в аналоговый сигнал необходимо выполнить операцию, обратную дифференцированию, т.е. интегрирование. Если на вход идеального интегратора ЦАП подавать последовательность импульсов ДМ сигнала, то выходное напряжение будет иметь вид ступенчатой функции uкв(kTд) с постоянным шагом ∆ (рис. 9.6,в). Эта ступенчатая функция и является аппроксимацией аналогового сигнала. Восстановление аналогового сигнала uпр(t) из квантового uкв(kТд) осуществляется, как и в ЦАП ИКМ, фильтром нижних частот (рис. 9.7). D. К недостаткам ДМ можно отнести явление размножения ошибок, создаваемых ложными импульсами, поскольку в схеме ДМ используется идеальный интегратор, обладающий бесконечной памятью, что приводит к накоплению ошибок. Для борьбы с этим явлением на практике либо периодически разрежают интегратор до нуля, либо используют интегратор, имеющий ограниченную постоянную времени.
D. К недостаткам ДМ можно отнести явление размножения ошибок, создаваемых ложными импульсами, поскольку в схеме ДМ используется идеальный интегратор, обладающий бесконечной памятью, что приводит к накоплению ошибок. Для борьбы с этим явлением на практике либо периодически разрежают интегратор до нуля, либо используют интегратор, имеющий ограниченную постоянную времени.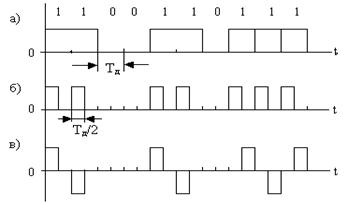 Преобразование исходного однополярного цифрового сигнала в код ЧПИ показано на рис. 9.8. Оно заключается в перемене полярности каждого последующего импульса на противоположную по отношению к предыдущему. Постоянная составляющая в спектре такой последовательности импульсов отсутствует, а основная энергия спектра сосредоточена в области тактовой частоты fд и согласуется с АЧХ кабельной линии.
Преобразование исходного однополярного цифрового сигнала в код ЧПИ показано на рис. 9.8. Оно заключается в перемене полярности каждого последующего импульса на противоположную по отношению к предыдущему. Постоянная составляющая в спектре такой последовательности импульсов отсутствует, а основная энергия спектра сосредоточена в области тактовой частоты fд и согласуется с АЧХ кабельной линии. Исторически получилось так, что рассмотренные аналого-цифровые преобразования называют модуляцией. По существу, это двоичное кодирование непрерывного сигнала. Более точно называть преобразование в АЦП и ЦАП кодированием и декодированием.
Исторически получилось так, что рассмотренные аналого-цифровые преобразования называют модуляцией. По существу, это двоичное кодирование непрерывного сигнала. Более точно называть преобразование в АЦП и ЦАП кодированием и декодированием.