Увеличение прочностных показателей материала, в частности микротвердости, при сохранении для данного материала пластичности и вязкости, разрушения, путем формирования многослойных наноразмерных тонкопленочных покрытий связано с формированием поверхностей раздела - межкристаллитных и межфазных, являющихся наиболее эффективными барьерами для дислокаций. Создание в пленочных материалах дислокационных барьеров указанных типов и регулирование расстояний между ними позволяют управлять прочностью и пластичностью. При неизменном объемном содержании пластичных и хрупких слоев прочностью многослойных композиций можно управлять изменением их толщины [15].
Как было отмечено выше, поверхностные свойства твердого тела начинаются на границе раздела двух сред и кончаются в глубине материала ~ 300 нм. В многослойных нано-размерных структурах увеличение прочности не приводит к увеличению хрупкости и склонности к внезапным разрушениям, в них рекомендуется объединять слои и пленки материалов, которые значительно отличаются по механическим характеристикам, обладают высокой стабильностью свойств и обеспечивают прочную связь (адгезию) между слоями.
При измерении микротвердости тонких пленок необходимо учитывать, что стандартный метод Виккерса не может быть использован для покрытий с толщинами менее 5,6 мкм, а метод наноиндентирования пригоден для субмикронных и нано-метровых пленок, но только на очень гладких образцах, например на кремниевых пластинах. В нанотвердомерах заложен метод измерения твердости тонких покрытий (менее 1 мкм), основанный на непрерывной регистрации нагрузки и глубины вдавливания индентора. Принцип их работы основан на регистрации с высокой точностью (порядка 10-12 м) перемещения алмазного индентора под действием малых сил.
При погружении индентора нормально к поверхности может происходить взрывообразное размножение дислокаций, деформационное старение и закрепление дислокаций диффундирующими точечными дефектами, фазовыми переходами, индуцированными высокими давлениями, зарождением микротрещин. Микротрешины не могут вырасти свыше некоторого критического размера, определяемого размером зерен. При снятии нагрузки эти маленькие трещины закрываются, приводя к восстановлению деформируемого участка
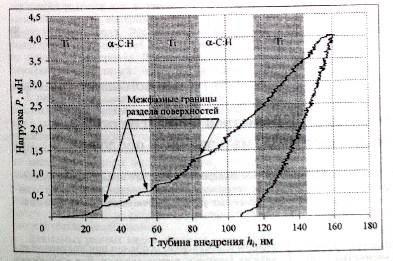
При измерении твердости многослойных покрытий на основе нанопленок титан/гидрогенизированный аморфный углерод с помощью нано-твердомера на определенной глубине внедрения индентора образуются замкнутые кольцевые трещины вокруг отпечатка. Кроме того, в многослойном покрытии сохраняются межфазные границы раздела, при прохождении через которые меняется механизм деформации, проявляющийся в виде характерной горизонтальной ступеньки (рис. 14), что свидетельствует о резком снижении сопротивления проникновению индентора в материал.
Рис. 14. Кривая наноиндентировання многослойной тонкопленочной структуры (hi = 30 нм - толщина каждого слоя) при максимальной силе нагружения 4 мН и скорости 8 мН/мнн
Посредством наноиндентирования можно обнаружить межфазные границы раздела между слоями в многослойном покрытии при достаточно низких скоростях деформирования. На рис. 20 представлена кривая наноиндентирования [15], соответствующая силе нагружения 4 мН и скорости 8 мН/мин, и обозначены межфазные границы раздела между слоями пятислойной структуры Ti/a-C:H/Ti/a-C:H/Ti.
1). При применении нанотехнологии в инженерии поверхности приставка "нано" существенно повлияла на характеристики поверхности и показатели качества изделий, на основе наноразмерных пленок, но не на методы _и_ средства их получения - традиционные для машиностроения, микроэлектроники, оптики и т.д.
2). Возросший интерес и расширение областей применения нанокомпозитных и наностуктурированных тонкопленочных покрытий, в том числе и многослойных, обусловлен возможностью значительной модификации или даже принципиального изменения свойств поверхности конструкционных материалов.
3). Для формирования таких покрытий наиболее перспективно объединение в одной вакуумной технологической установке нескольких методов нанесения тонких пленок в вакууме:
- например, магнетронного и ионно-лучевого распыления,
- импульсного дугового испарения,
- ионного осаждения и других методов.
4). Для этого можно использовать оборудование различного различного класса - от недорогих установок периодического действия до автоматизированных установок шлюзового типа [16], в том числе с протяженными технологическими источниками для обработки крупногабаритных изделий.
1.Физическая энциклопедия. В 5 т. Т. 3. М.: Большая Российская энциклопедия, 1992. С. 652
2.Гусев А.И., Рекпель А.А. Нанокристаллические материалы. М.: Физматлит, 2000.
3.Ормонт Б.Ф. Введение в физическую химию и кристаллохимию полупроводников. Издание второе, переработанное и дополненное. М.: Высшая школа, 1973.- 528 с.
4.Панфилов Ю.В. Анализ технологии вакуумного формирования сверхтонких пленок / Микросистемная техника. 2001. № 1. С. 22-25.
5. International Conference on Nanostructured Materials / Book of Abstracts. June 20-24. 2004. Wiesbaden/Germany. 412 pp.
6.Вакуумное оборудование тонкопленочной технологии производства изделий электронной техники: Учебник для студентов специальности "Электронное машиностроение" / под ред. Л.К. Ковалева, Н.В. Василенко.: В 2 т. Т. 2. Красноярск: Сиб. аэрокосм. акад. 1995. 256 с.
7.Бочкарев В.Ф., Горячев А.А., Наумов В.В. Исследование механизма роста металлических пленок / Материалы X Международной научно-технической конференции "Высокие технологии в промышленности РосЙш" и XVI Международного симпозиума "Тонкие пленки в электронике". М.: 2004. С. 368-372.
8.Монокрясталлическне пленки / под ред. З.Г. Пинскера. М.: Мир, 1966. 398 с.
9.Технология тонких пленок (справочник) / под ред. Л. Майссела, Р. Глэнга, Т. 2. М.: Советское радио. 1977.-768 с.
10.Новые материалы / под научной ред. Ю.С. Карабасова. М.: МИСИС. 2002. 736 с.
12.Панфилов Ю.В., Гладышев И.В., Левашов Е.А., Штанскин Д.В., Шевейко A.R. Повышение стойкости инструмента с помощью многокомпонентных наноструктурных тонкопленочных покрытий // Справочник. Инженерный журнал. 2004. № 4. С. 40-42.
13.Панфнлов Ю.В., Каменева АХ, Беликов А.И. и др. Наноструктурированные износостойкие многокомпонентные тонкопленочные покрытия // Упрочняющие технологии и покрытия. 2005. № 4. С, 30-34.
14.Бойченко М.К., Быков Ю.А., Карпухин С.Д., Булыгина Е.В., Осипов А.В., Панфилов Ю.В. Исследование твердости многослойных тонкопленочных покрытий / Вакуумная наука и техника / Материалы 9-й научно-технич.конфер. с участием зарубежных специалистов. Судак. 2002 г. С. 178-183.
16.Панфилов Ю.В. Модернизация вакуумного оборудования микроэлектроники для нанесения упрочняющих покрытий // Упрочняющие технологии и покрытия. 2006. № 1. С. 50-52
В Советском Союзе наука со столь вызывающим названием официальное признание получила в 1974 году, когда был создан при президиуме АН СССР Научный совет по проблеме "Искусственный интеллект". Первые положительные результаты были получены в области теории управления — одной из наиболее хорошо развитых областей прикладной математики. В конце 70-х—начале 80-х годов прошлого века было осознано, что в этой области имеется ряд задач, для решения которых традиционные методы не пригодны. Так возникли логико-лингвистические модели в системах управления. Необходимость создания таких моделей объяснялась тем, что в сферу автоматизации оказались вовлеченными объекты столь сложной структуры, что традиционные методы теории управления для них оказались либо мало эффективны, либо непригодны:
- не все цели управления объектом могут быть выражены в виде количественных соотношений;
- между рядом параметров, оказывающих влияние на процесс управления, не удается установить точных количественных зависимостей;
- в многошаговых процессах управления содержание каждого шага не может быть заранее однозначно определено;
- существующие способы описания объектов и протекающих в них процессов приводят к столь громоздким конструкциям, что их практическое использование не представляется возможным.
Если под объектом управления понимать экономические или социальные объекты, то к этому добавляются еще три причины:
- цель существования самого объекта не может быть строго формализована;
- в результате эволюции меняется структура и функции самого объекта, что должно отражаться и на эволюции процесса управления;
- элементы, входящие в структуру управляемого объекта, могут иметь активную природу: их поведение может противоречить целям управления.
В результате для построения моделей таких объектов управления приходится отказываться от классических методов теории управления и переходить к подобным моделям, в которых решающее значение имеют тексты на естественном языке, т. е. к логико-лингвистическим моделям.
К истории вопроса
Управление самолетом, безусловно, одна из наиболее важных областей автоматизации в системах управления.
В майском номере журнала "Wired" за 2002 год опубликовано несколько публичных пари, заключенных между достаточно известными деятелями ИТ-рынка. Предметами споров служат предсказания на самые разные темы. Например, высказано предположение, что коммерческие авиакомпании к 2030 году перейдут на беспилотные самолеты. Ставка — тысяча долларов. Крэйг Манди, технологический директор корпорации Microsoft, ставит на то, что так оно и будет. Он считает, что компьютерные системы будут настолько совершенны к тому времени, что даже диспетчерские службы будут полностью автоматизированы.
Против этого ставит исполнительный директор компании Google Эрик Шмидт. По его мнению, полностью беспилотные транспортные самолеты станут реальностью гораздо позже, а может быть, и не станут вообще. В любом случае, невозможно обойтись без, как минимум, одного пилота, который бы наблюдал за работой автомата, и в случае чего, перехватил бы у него управление.
В связи с этим вспоминается, не имеющий аналогов в истории освоения космоса, единственный беспилотный "рейс" нашего космического корабля многоразового использования "Буран". Он стартовал 15 ноября 1989 года с самолета, поднявшего его в стратосферу. Отделившись от самолета, корабль поднялся в космос, сделал два витка вокруг Земли и приземлился на обычном аэродроме. Как рассказывают очевидцы события, все происходило исключительно "штатно" до того момента, когда "Буран", сопровождаемый истребителями, при заходе на посадку стал делать неожиданный вираж, отклоняясь от нужной траектории посадки. Волнение оказалось напрасным, т. к. он вскоре выправился и сел так, как если бы им управлял опытный пилот. Когда стали анализировать причину неожиданного виража, то оказалось, что в систему управления было заложено правило захода на посадку в случае порывов бокового ветра. Как выяснилось, именно такой порыв ветра и имел место, и, если бы не соответствующая "поправка", приземление оказалось бы неудачным.
В 1987 году в одном из американских журналов было приведено описание экспертной системы, предназначенной для помощи пилоту во время посадки бомбардировщика. Необходимость наличия на борту консультационной системы, помогающей пилоту при посадке, и системы (аварийной) автоматической посадки там обосновывалась большим риском, связанным с посадкой самолета, на борту которого находится ядерное оружие, а также возможностью ситуаций, когда экипаж не в состоянии справиться с этой задачей самостоятельно.
Под логико-лингвистической моделью управления понимается такая модель управления сложным объектом, в которой используется семантическая (смысловая, качественная) информация. Многие задачи управления сложными объектами без труда решаются человеком, но в силу различных обстоятельств (опасность для человека выполнения тех или иных функций, недостаточные надежность или быстродействие их выполнения) требуют автоматизации. В таких случаях опыт человека-специалиста (человека-оператора) может быть выражен в виде текста на естественном языке. Этот опыт и требуется использовать в системе искусственного интеллекта. Зачастую этот опыт не может быть представлен в виде алгоритма деятельности, который мог бы быть записан в память машины. Состояние объекта характеризуется столь большим числом параметров и может зависеть от столь большого количества ситуаций, что невозможно заранее определить содержание каждого шага управления. Именно в этих случаях вместо алгоритма, предписывающего на каждом шаге его реализации некоторое однозначное решение, можно использовать совокупность указаний, представленных в виде некоторого исчисления.
Языком этого исчисления выбирается язык, называемый языком представления знаний, в качестве аксиом исчисления служит описание объекта управления, среды, начальных состояний. В качестве правил вывода служат правила перехода из одного состояния объекта управления и среды в другое, в качестве теорем — промежуточные и конечные состояния системы (рис. 1.1).
Рис.1.1. Общая структура логико-лингвистической (семиотической) системы управления
Если в качестве объекта управления рассматривать некоего робота, осуществляющего определенную деятельность — перемещение, выполнение операций, то под средой можно понимать всевозможные условия, в которых осуществляется функционирование.
Модель знаний М содержит описание объекта управления Mо и описание среды объекта управления Ms. При этом существуют несколько уровней этого знания: от фундаментальных (неизменных) знаний до знаний, которые зависят от данной конкретной ситуации.
Механизм порождения решений F анализирует состояние (ситуацию), в которой находятся объект управления и среда, и вырабатывает некоторое решение.
Существенным отличием семиотической (знаковой или логико-лингвистической) модели системы управления от традиционной являются два момента.
Во-первых, наличие модели знаний. Модель знаний отделена от механизма порождения решений, следствием чего является существенное упрощение описания системы управления и ее функционирования. Такой способ представления знаний в области интеллектуальных систем носит название декларативного представления знаний в отличие от процедурного способа представления знаний в виде алгоритмов управления.
Удобство разделения блоков F и М связывают также и с тем, что заменить информацию в М гораздо легче, чем написать новые процедуры для блока F.
Во-вторых, наличие интерпретатора I. Это блок, отражающий изменения блока M, содержимое которого меняется в процессе функционирования объекта управления: обновляется, уточняется и пополняется.
Первым случаем практического использования логико-лингвистических моделей в управлении было ситуационное управление, с помощью которого была автоматизирована в 1967 году диспетчерская служба на шлюзованных участках водных путей.
В основу ситуационного управления были заложены следующие принципы. Управление системой рассматривается как процесс, включающий в себя использование семиотической (знаковой) модели функционирования. Эта модель содержит описание системы, связи между элементами системы и внешней средой, правила функционирования системы, на основании которых можно предвидеть последствия принятия тех или иных решений и выбирать наилучшие. Такой подход используется в тех многочисленных случаях, когда из-за сложности законов управления система управления не может быть описана методами классической теории управления. А также в тех случаях, когда невозможна или нецелесообразна формализация процесса управления в виде систем математических уравнений, но при этом имеется описание этого процесса на естественном языке (в лингвистической форме).