5.1 Будова трифазних асинхронних двигунів і принцип роботи.
5.2 Обертовий момент та механічна характеристика асинхронного двигуна.
5.3 Асинхронний двигун із фазним ротором.
5.4 Регулювання швидкості обертання ротора асинхронного двигуна.
5.5 Пуск асинхронного двигуна.
5.1 Будова трифазних асинхронних двигунів і принцип роботи
Асинхронна машина – це машина змінного струму, в котрій збуджується обертове магнітне поле. Ротор обертається асинхронно, тобто зі швидкістю, що відрізняється від швидкості обертання поля.
Асинхронні машини – це:
– асинхронні двигуни (АД) – як правило, трифазні, дуже поширені;
– асинхронні генератори – практично не використовуються (низькі
експлуатаційні характеристики).
Асинхронна машина складається з ротора й статора.
Статор – нерухомий – має шихтоване осердя, у пазах котрого розташована обмотка (як правило, трифазна; це котушки, зсунуті в просторі на 120°).
Ротор – рухомий, буває 2-ох типів:
– короткозамкнений (КЗ ротор);
– фазний.
Короткозамкнений ротор – це шихтований циліндр із пазами. У пази вкладаються стрижні, замкнені електрично з обох боків кільцями («біляче колесо») (рис. 5.1).
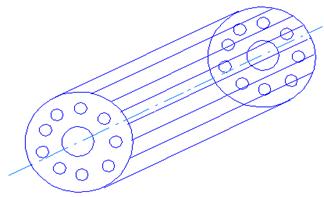
Рисунок 5.1 – Ротор («біляче колесо»)
Будова АД із КЗ ротором зображена на рисунку 5.2.
| Статор
Обмотка статора
Ротор
Обмотка ротора
| |




Рисунок 5.2 – Будова асинхронного двигуна з короткозамкненим ротором

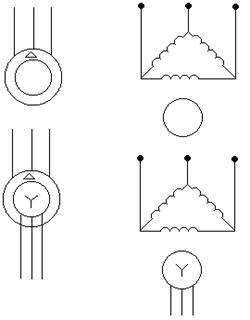
Рисунок 5.3 – Графічне позначення АД
В обох випадках (рис. 5.3) обмотка статора з’єднана у «трикутник».
Трифазна обмотка статора створює обертове магнітне поле. Швидкість обертання поля визначається так:
 , (5.1)
, (5.1)
де f1 – частота струму в обмотці статора (мережі);
р – кількість пар полюсів обмотки статора.
При частоті f1 = 50 Гц швидкість обертання магнітного поля може приймати тільки такі дискретні значення, які зазначені в таблиці 5.1.
Таблиця 5.1 – Значення стандартної швидкості обертання магнітного поля статора
Оскільки швидкості обертання ротора і магнітного поля статора неоднакові, виникає певна асинхронність.
Ступінь відставання швидкості обертання ротора від швидкості обертання поля статора оцінюється ковзанням. Величина s (ковзання) характеризує асинхронність
 . (5.2)
. (5.2)
У режимі двигуна s = (1  0).
0).
S = 1; n2 = 0 – двигун нерухомий, режим пуску.
S = 0,02 ÷ 0,05 – номінальний режим.
5.2 Обертовий момент та механічна характеристика асинхронного двигуна
Електромагнітний (обертовий) момент АД пропорційний магнітному потоку та струму ротора.
 , (5.3)
, (5.3)
де  – зсув фаз між ЕРС та струмом.
– зсув фаз між ЕРС та струмом.
m2 – кількість фаз обмотки ротора.
 – стала машини (залежить тільки від конструктивних особливостей машини).
– стала машини (залежить тільки від конструктивних особливостей машини).
Рівняння механічної характеристики має вигляд
 . (5.4)
. (5.4)
Це рівняння називають спрощеною формулою Клосса,
де  – максимальний момент;
– максимальний момент;
 – критичне ковзання АД, при якому електромагнітний момент набуває максимального значення.
– критичне ковзання АД, при якому електромагнітний момент набуває максимального значення.
Наведені рівняння дають змогу побудувати механічні характеристики (природну та штучну).
Природна механічна характеристика – це характеристика АД із КЗ ротором (опір обмотки ротора практично дорівнює R2 ≈ 0).
Штучна характеристика – це характеристика АД з опором обмотки ротора R2 > 0 (фазний ротор).
Залежність М(S) асинхронних машин має вигляд, зображений на рисунку 5.4.
 М
М
Режим генератора
1 2 S
Режим двигуна Режим електромагнітного гальма
Рисунок 5.4 – Електромагнітний момент асинхронного двигуна
Як і всі електричні машини, асинхронні машини оборотні. У режимі 0 < S < 1 АМ працює як двигун. При від’ємному значенні ковзання (швидкість ротора більша за швидкість обертання поля) АМ працює як генератор. Якщо зовнішня сила обертає ротор проти напрямку обертання поля (S > 1), АМ працює як електромагнітне гальмо.
Механічна характеристика – це залежність швидкості обертання ротора від електромагнітного моменту, тобто n2 = f(M).
Стосовно асинхронного двигуна механічна характеристика така, як наведено на рисунку 5.5.
s n2
| Робоча ділянка
Стійка
робота
| |
 S = 0 n1
S = 0 n1
S = Sном nном Мном
S = Skp nkp Ммах (Мкр) [нестійка робота]
S = 1
M = 0 Mпуск.
Рисунок 5.5 – Механічна характеристика режиму двигуна
Вона визначає експлуатаційні можливості АД.
При n2 = 0 здійснюється пуск АД.
При s = 0 (ротор наздогнав поле) n2 = n1, M = 0.
У межах 0 < s < skp швидкість обертання несуттєво залежить від моменту опору. Ця частина характеристики вважається жорсткою.
У межах skp < s < 1 – м’яка механічна характеристика.
Пусковий момент менший, ніж номінальний. Тому необхідно, щоб момент опору був меншим, ніж пусковий, тобто
Мпуск > Мопору.
Таким чином, двигун доцільно пускати розвантаженим.
Практично в АД номінальний момент становить Мном = 0,5Ммах.
Асинхронні двигуни конструюються так, що максимальний ККД забезпечується при навантаженні, трохи меншому за номінальне.
ККД асинхронних двигунів досить високий (80 – 90%). У потужних асинхронних двигунів ККД = 90 – 96%.
Максимальний момент АД не залежить від активного опору ротора. Стійкість роботи АД характеризується його перевантажувальною здатністю  . Для АД із КЗ ротором λ = 1,7…2,8.
. Для АД із КЗ ротором λ = 1,7…2,8.
5.3 Асинхронний двигун із фазним ротором
Фазний ротор (або ротор з контактними кільцями) має трифазну обмотку (аналогічна обмотці статора). Вона з’єднується «зіркою»! Кінці обмотки приєднуються до трьох контактних кілець, які встановлені на валу ротора. На кільцях установлюються щітки, що електрично з’єднуються з трифазним реостатом (Rп). Це дозволяє штучно збільшувати опір обмотки ротора (рис. 5.6).
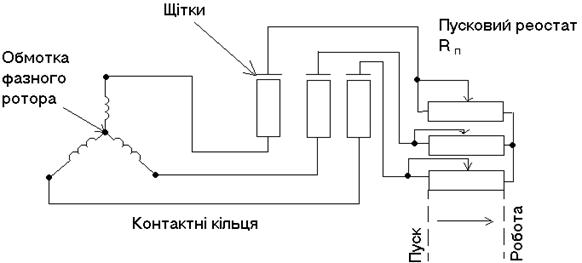
Рисунок 5.6 – Будова асинхронного двигуна з фазним ротором
Асинхронний двигун із фазним ротором має кращі умови пуску. Вираз для електромагнітного моменту має вигляд
М = С Фm І2cosψ2, (5.5)
де ψ2 - зсув фаз між ЕРС та струмом у роторі.
Якщо ввімкнути трифазний реостат послідовно з обмоткою ротора, то збільшиться опір R2, зменшиться ψ2, зросте пусковий момент і поліпшаться умови пуску. Зміна опору реостата (введення реостата) дає змогу змінювати швидкість обертання ротора.
Зміна механічної характеристики двигуна із уведенням реостата виявляється таким чином (рис. 5.7).
Рисунок 5.7 – Механічні характеристики асинхронного двигуна з фазним ротором
При збільшенні додаткового опору характеристика стає більш м’якою, а пусковий момент зростає.
Характеристики (рис. 5.7) не економічні, тому що значна кількість енергії в реостаті перетворюється в тепло. Тому АД із фазним ротором застосовуються лише при великих потужностях та високих вимогах до електропривода.
5.4 Регулювання швидкості обертання ротора асинхронного двигуна
В асинхронному двигуні частота обертання визначається з рівності
 . (5.6)
. (5.6)
Із цього виразу виходить, що змінювати n2 можна трьома способами:
– зміною частоти f1 (частоти мережі живлення);
– зміною кількості пар полюсів р;
– зміною ковзання s.
5.4.1 Регулювання зміною частоти (частотне регулювання)
Для зміни частоти f1 застосовують машинні або напівпровідникові (тиристорні) перетворювачі (рис. 5.8).
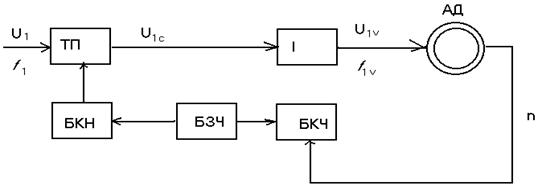
Рисунок 5.8 – Частотне тиристорне регулювання швидкості обертання ротора асинхронного двигуна
ТП – тиристорний перетворювач; І – інвертор; БКН – блок керування напругою; БЗЧ – блок задання частоти; БКЧ – блок керування частотою.
ТП живиться від трифазної мережі при U1 = const; f1 = const. На виході ТП одержують постійну напругу U1c. Ця напруга надходить на інвертор, на виході якого одержують регульовану напругу U1v при частоті f1v. Ця напруга подається на АД.
Для автоматизації процесу регулювання застосовуються БЗЧ, БКН, БКЧ.
5.4.2 Регулювання зміною кількості пар полюсів
Виводи статорної обмотки перемикаються в клемній коробці. Залежно від їх комутації змінюється кількість пар полюсів (р). Цей спосіб дає змогу регулювати оберти ступенево.
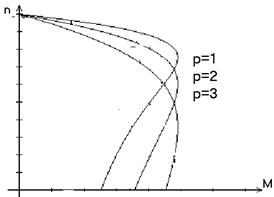
Рисунок 5.9 – Регулювання швидкості обертання ротора
зміною кількості пар полюсів
Цей спосіб регулювання економічний. Робоча частина характе – ристики жорстка, але він застосовується тільки тоді, коли немає жорстких вимог до плавності регулювання (наприклад, насоси, вентилятори і т.ін.).
5.4.3 Регулювання частоти обертання зниженням підведеної напруги (напруги живлення)
При зниженні напруги момент двигуна М зменшується пропорційно U2, у результаті цього змінюються механічні характеристики, зменшується критичний момент Мкрит, при постійному моменті опору Мопору збільшується ковзання та падає частота обертання ротора.
Змінювати напругу U можна вмиканням у коло статора реостатів або автотрансформаторів (рис. 5.10).
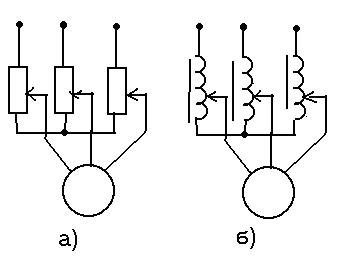
Рисунок 5.10 – Регулювання частоти обертання зниженням напруги живлення
При вмиканні реостатів (рис. 5.10, а) у них утрачається значна активна потужність (R.I2); автотрансформатори дають змогу регулювати частоту обертання вручну (рис. 5.10, б).
Ці способи застосовуються тільки для двигунів малої потужності, тому що знижується ККД, зменшується Мкрит, а діапазон регулювання порівняно незначний.
5.5 Пуск асинхронного двигуна
Застосовуються такі способи пуску:
– прямий пуск;
– пуск із використанням додаткових опорів;
– пуск при зниженій напрузі.
5.5.1 Прямий пуск
При цьому на обмотку статора подається номінальна напруга, схема наведена на рисунку 5.11.
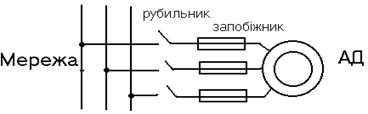
Рисунок 5.11 – Прямий пуск асинхронного двигуна
При вмиканні рубильника ковзання s = 1, а струм у роторі й рівний йому струм статора максимальні. В міру розгону ротора s зменшується, і в кінці пуску струм значно знижується.
У серійних АД при прямому пуску пусковий струм перевищує номінальний у 5 – 7 разів, тобто в мережі живлення виникає стрибок струму. Це може викликати таке значне падіння напруги, що інші двигуни, які живляться від цієї мережі, можуть зупинитися. Відносно невеликий Мпуск може призвести до того, що при пуску АД під навантаженням він не зможе подолати момент опору і не зрушить із місця.
Через це прямий пуск можливо застосовувати тільки для АД потужністю до 50 кВт.

