RAID 0 ("Striping" – «переміжання») - дисковий масив з відсутністю надмірності. Інформацію записують на диски послідовно, розбиваючи на блоки даних (Di):
RAID 0
/ | \
| D1 | | D2 | … | Dn |
|Dn+1 | |Dn+2 | … | D2n |
|D2n+1| |D2n+2| ... | D3n |
За рахунок цього істотно підвищується продуктивність (пропорційно кількості дисків у масиві), але страждає надійність усього масиву: при виході з ладу будь-якого вінчестеру повністю й безповоротно зникає вся інформація. Відповідно до теорії ймовірності, надійність масиву RAID 0 дорівнює добутку надійностей складових його дисків, кожна з яких менше одиниці, таким чином сукупна надійність свідомо нижче надійності кожного з дисків. RAID 0 може бути реалізований як програмно (під керуванням центрального процесора) так і апаратно (використовують спеціальний контролер з особистим процесором введення-виводу і, як правило, з особистою кеш-пам’яттю).
RAID1 ("Mirroring" = "дзеркало"). Він має захист від виходу з ладу половини наявних апаратних засобів (у загальному випадку - одного із двох жорстких дисків), забезпечує прийнятну швидкість запису й виграш у швидкості читання за рахунок распараллелювання запитів. Недолік полягає в тім, що доводиться виплачувати вартість двох жорстких дисків, одержуючи корисний обсяг одного жорсткого диска.
Жорсткий диск — річ достатнью надійна: середній час наробітку на відмову — близько мільйона годин (звісно, без врахування збоїв живлення). Відповідно, ймовірність виходу з ладу відразу двох дисків дорівнює (за формулою) добутку ймовірностей, тобто нижче на порядки. Реальна користь використання RAID1 обмежується тим, що при виході з ладу одного з дисків навантаження на ті, що залишились, збільшується, тому на практиці при виході з ладу одного з дисків варто терміново знову відновлювати надмірність — замінити диск. Для цього з будь-яким рівнем RAID (крім нульового) рекомендують використовувати додаткові (у нормальному режимі їх не використовують) диски гарячого резерву HotSpare, які автоматично підключають до масиву при збої одного з дисків. В свою чергу, для заміни дисків без відключення комп’ютера їх монтують у спеціальний відсік гарячої заміни. Перевага такого підходу — підтримка постійної надійності. Недолік — ще більші витрати (вартість ще одного диска).
RAID5 — самий популярний з рівнів, у першу чергу завдяки своїй економічності. Жертвуючи заради надмірності ємністю всього одного диска з масиву, ми одержуємо захист від виходу з ладу будь-якого одного з вінчестерів. Для запису інформації на кожний диск RAID5 витрачають додаткові ресурси, тому що потрібні додаткові обчислення, зате при читанні (у порівнянні з окремим вінчестером) є виграш, тому що потоки даних з декількох накопичувачів масиву распараллелюють. Недоліки RAID5 проявляють при виході з ладу одного з дисків - весь том переходить у критичний режим, всі операції запису й читання супроводжують додатковими маніпуляціями, різко падає продуктивність, диски починають нагріватися. Якщо терміново не вжити заходів - можна втратити весь том. Тому в складі RAID5 варто обов'язково використовувати диск Hot Spare.
Крім базових рівнів RAID0, RAID1, RAID5, описаних у стандарті, існують комбіновані рівні RAID10, RAID30, RAID50, RAID15, які різні виробники інтерпретують кожний по-своєму. Приклад — RAID10 (RAID1+0). При використанні такого рівня дзеркальні пари дисків вистроюють в «ланцюжок», тому обсяг отриманого тому може перебільшувати ємність одного жорсткого диска. Масив з чотирьох дисків є отказостійким, має ємність 2 окремих дисків, а також подвійну швидкість запису даних. RAID50 - це об'єднання по “0” томів 5-го рівня. RAID15 - «дзеркало» «п'ятірок».
Для підвищення надійності каналів зв’язку та інших елементів також використовують їх резервування: «холодне» та «гаряче». Включення резервних елементів при виході з ладу основних може бути ручним або автоматичним. Найбільш сучасні технології резервування (наприклад, каналів зв’язку) дозволяють у нормальному режимі користуватись як основним, так і резервним елементами, тобто збій веде тільки до зменшення продуктивності. Резервовані елементи, які обробляють інформацію, також часто функціонують паралельно. Після відновлення від збою паралельно працюючих елементів, що містять інформацію (наприклад, сервер), треба вирішити завдання сінхронізації інформації на усіх елементах.
5. АВТОМАТИЗОВАНІ СИСТЕМИ
5.1. Призначення й види АС.
5.2. Життєвий цикл АС.
5.3. Види забезпечення АС.
5.4. Основні галузеві нормативні документи й міжнародні стандарти.
Автоматизована система (АС) – це сукупність апаратних (технічних) та програмних засобів, що виконують цільові завдання під керуванням людини. Автоматичною системою керує алгоритм без участі людини.
Загальні характеристики АС:
· призначення;
· структура;
· надійність і безпека;
· показники призначення й функціональність;
· режим експлуатації;
· чисельність і кваліфікація обслуговуючого персоналу;
· захист інформації;
· захист технічних засобів;
· рівень стандартизації й уніфікації.
Життєвий цикл АС:
· проектування;
· впровадження:
o розробка/адаптація апаратури й програмного забезпечення,
o поставка, монтаж, пусконалагодження системи,
o випробування системи і дослідна й експлуатація;
· промислова експлуатація, протягом якої виконується модернізація.
Види забезпечення:
· технічне;
· інформаційне;
· програмне;
· лінгвістичне;
· математичне;
· організаційне;
· метрологічне;
· методичне.
Основні діючи нормативи
· ГОСТ 34.ххх на автоматизовані системи;
· ГОСТ 2.ххх — єдина система конструкторської документації (ЄСКД);
· ГОСТ 19.ххх — система програмної, експлуатаційної документації;
· Концепція побудови АСКОЕ в умовах енергоринку, інструкція про порядок комерційного обліку;
· Стандарти IEC 61870 (телемеханіка, облік, мікропроцесорні системи РЗА), IEC 61850 (системи зв'язку на ПС);
· нормативна документація щодо технічного захисту інформації (НД ТЗІ);
6. АСУ ТП ПС І МІКРОПРОЦЕСОРНЕ обладнАННЯ ПС
6.1. Призначення АСУ ТП
6.2. Мікропроцесорне встаткування станцій, підстанцій
6.2.1. мікропроцесорні захисти й реєстратори аварій,
6.2.2. КП телемеханіки й інтелектуальні цифрові датчики,
6.2.3. цифрові прилади й пристрої обліку ЕЕ, прилади для контролю якості ЕЕ
6.3. Структурна схема АСУ ТП
6.4. Системи контролю якості електричної енергії.
Найважливішою частиною систем керування електричними мережами є система керування рівня підстанції — АСУ ТП ПС. Сьогодні компекс технічних засобів (КТЗ) АСУ ТП ПС ПС повинен забезпечувати збір технологічних даних про роботу системи, передачу їх на верхній рівень диспетчерського керування (диспетчерський центр), передавати ці дані на автоматизоване робоче місце (АРМ) оперативного персоналу підстанції. Також можливе виконання функцій керування технологічним процесом. До технологічних даних можливо віднести:
· поточні значення електричних величин, що характеризують основну трифазну мережу змінного струму — напруг, струмів, потужностей, частоти, а також показники якості електричної енергії;
· поточні значення величин, що характеризують допоміжні мережі об’екту — електричні параметри мережі власних потреб і мережі постіного струму, параметри мережі повітряприготування;
· поточні значення теплотехнічніх та інших величин на електростанціях, що характеризують процес генерації електроенергії — тиск та температуру газу, пари, води або інших теплоносіїв;
· осцілограми перехідних процесів — наприклад, коротких замикань у мережі;
· положення електричних комутаційних апаратів, стану пристроїв захисту та автоматики, клапанів, вентилів;
· параметри, що характеризують кліматичні обставини на об’екті — температуру й тиск повітря, швидкість вітру;
· диагностичні параметри, що характеризують стан обладнання — наприклад, кількість відключень вимикачів, тангенс кута діелектричних втрат в ізоляції.
Традиційно питання дистанційного контролю та управління вирішувалось засобами.
Телемеханіка - сукупність засобів передачі (до 90-х років минулого століття — також відображення) поточних параметрів технологічного процесу на більші відстані. Пристрій верхнього рівня, що забезпечує збір даних з ПС, називається пунктом управління (ПУ) або центральною приймально-передавальною станцією (ЦППС), пристрій на підстанції, що збирає дані від датчиків та вимірювальних перетворювачів і передає їх до ПУ — контрольований пункт (КП). Канали зв'язку між КП і ПУ можуть бути дротяними (наприклад, на базі телефонної мережі) або бездротяними (радіоканал, GSM, GPRS, супутникові канали). Типи сигналів:
ТС – телесигнал (двійковий типу «ТАК/НІ»)
ТВ, ТВП – телевимірювання (поточне), кодують 8- або 16-розрядним цілим числом;
ТВІ – телевимірювання інтегральне (приймає імпульси від лічильників, кожен імпульс відповідає визначеній кількості кВт-годин електроенергії);
ТУ – телеуправління виконавчими механізмами («Вмикнути» / «Вимкнути»);
ТР – телерегулювання (плавне або багатопозіційне керування).
Способи обміну між ПК та КП: опрос, циклічне передавання та спорадичне (за зміною значення сигналу) передавання.
Способи кодування й захисту даних визначає телемеханічний протокол. Раніше кожен розробник комплексів телемеханіки розробляв свій власний протокол зв’зку. Приклади таких, досить розповсюджених систем:
· УТС-8, УТК-1, ВРТФ-3 — найбільш примітивні системи з жостко визначеною кількістю сигналів;
· КОМПАС, ТМ-512. ТМ-120, ТМ-320, Граніт, ТМ-800В — більш досконалі модульні пристрої з 8-розрядними АЦП;
· МКТ-2, МКТ-3, ТМ-800А – теж саме, використовують на ПС 330 кВ для роботи в циклічному режимі;
· Корунд-М/КА-96, Спрут/КОТ — сучасні відчізняни системи з підтримкою МЕК-870-5-101 та 12-розрядними АЦП.
Класифікацію систем телемеханіки наведено на рис. 6.1.
Вимірюівання всіх цих величин виконують за допомогою вимірювальних перетворювачів. Сучасні перетворювачі є цифровими, вони вимірюють вхідний сигнал і перетворюють його у цифрову форму за допомогою власних аналого-цифрових перетворювачів (АЦП).
Для високовольтних підстанцій існують вимоги до обсягу та якості інформації, що збирається з датчиків: положення комутаційних апаратів повинні опитуватися контрольованим пунктом (КП) 8 разів у секунду, значення фазних струмів, фазних/лінійних напруг, активної й реактивної потужності, частоти повинні опитуватися 1 раз на секунду (для сигналів перетоків потужності по ПЛ 110-750 кВ). Передані на верхній рівень дані повинні забезпечуватися мітками часу, телевимірювання повинні мати розрядність не менше 12 біт, тому де-факто стандартним телемеханічним протоколом передачі є МЭК 61870-5-101, а телемеханічні канали зв'язку повинні мати швидкість 2400 - 9600 бод, тобто на порядок вище традиційних ВЧ-ущільнених каналів (40 - 600 бод).
Представлена на рис. 6.2 структурна схема являє приклад реалізації КТЗ АСДУ ПС на базі універсального контрольованого пункта телемеханіки (УКП ТМ) «Корунд-М» та цифрових вимірювальних перетворювачів, що підтримують цифровий інтерфейс RS-485 та протокол Modbus.

Рис. 6.1 – Традіційна класифікація систем телемеханіки[*]


УКП телемеханіки має модульну структуру, містить модулі: центрального процесора (МЦП), живлення (МЖ), телесигналізації (МТС), сполучення із ВЧ-каналами телемеханіки та підключення цифрових вимірювальних перетворювачів (МКА), телевимірювать інтегральних (МТВІ) і поточних (МТВП), телеуправління (МТУ).
Для захисту УКП від перешкод по вимірювальним ланцюгам служить шафа захистів. Вимоги до телевимірювань визначають використання цифрових вимірювальних перетворювачів (ЦВП), що підключають до УКП за допомогою вузла комунікацій КП. Досить розповсюджені ЦВП багатьох виробників мають модифікації, що забезпечують технічний облік електроенергії. ЦВП з'єднують між собою шиною RS-485 (число пристроїв визначається необхідним періодом опитування й може становити від 5 пристроїв для приєднань 220-750 кВ до 3 пристроїв для приєднань 6-10 кВ). Типова схема передбачає підключення 40 ЦВП по 8 каналам RS-485. Вузел комунікацій також забезпечує обмін інформацією з верхнім рівнем по швидкісним телемеханічним каналам (основному й резервному).
Необхідна від КТЗ підтримка телемеханічних низкошвідкістних ВЧ-каналів реалізується безпосередньо в КП, при цьому використовують існуючі телемеханічні модеми (ТТ-144, АПСТ-М і т.ін.).
Автоматизація роботи чергового електромонтера (диспетчера) підстанції включає як відображення поточної схеми комутації й значень ТВ на мнемосхемі ПС, так і роботу із заявками, бланками перемикань і паспортних даних устаткування ПС, що вимагає інтенсивного обміну інформацією з ОІК АСДУ верхнього рівня. Зв'язок КП із АРМ чергового ПС здійснюється за допомогою вузла мережі, що забезпечує поділ підмереж АСДУ ПС, ЛВС ПС, КП телемеханіки й можливість підключення до корпоративного TCP/IP каналу зв'язку за допомогою змінних інтерфейсних модулів. Застосування стандартних промислових рішень дозволяє підключати мікропроцесорні пристрої захистів, реєстраторів аварій і т.п., що дозволяє з АРМ чергового ПС (а при наявності досить швидкісного каналу зв'язку - фахівцям центральних служб) зчитувати із цих приладів дані (в. т.ч. в автоматичному режимі) й виконувати їх параметрування.
Електричне живлення системи резервується (з 2 секцій власних потреб) автоматом включення резерву АВР.
Тенденція до інтеграції різних мікропроцесорних систем і технічних засобів підстанцій і зростаючі запити диспетчерської та інших служб до кількості і якості одержуваної на ПС інформації визначають вимогу до можливості стикування КТЗ АСДУ з мікропроцесорними засобами релейного захисту й автоматики, реєстраторами аварій, у найближчому майбутньому - із пристроями неруйнуючого контролю й діагностики силового встаткування під навантаженням, а також можливість обміну інформацією з локальною комп'ютерною мережею підстанції з умовою забезпечення розмежування доступу й безпеки роботи засобів АСДУ.
Існує міжнародний стандарт МЭК 850 (IEC61850), який визначає способи з’єднання усіх мікропроцесорних приладів на підстанції в одну мережу на базі ЛОМ Ethernet та стека протоколів TCP/IP.
Програмне забезпечення для керування технологічними процесамі, на базі якого створюють системи керування конкретними об’ектами, має загальну назву SCADA/HMI (Supervisory Control And Data Acquisition/Human-Machine Interface), тобто система збору даних та диспетчерського керування / людино-машинне міжпиччя .
Приклади таких систем: Intellution iFIX, AdAstra TraceMode, Klinkmann InTouch, Iconics Genesis32, Siemens Simatic. У склад входять:
· база даних реального часу (БД РЧ),
· драйвери введення-виводу сигналів телемеханіки,
· тривожна сигналізація,
· підтримка ЛОМ,
· інтерфейс користувача на клієнтських місцях, у тому числі відображення мнемосхем підстанцій та мережі;
· безпека й регламентація доступу, захист даних,
· двійкова історія (ретроспектива) сигналів,
· підсистема розробки (редактори мнемосхем, БД РВ та ін.).
7. СИСТЕМИ АВТОМАТИЧНОГО РЕГУЛЮВАННЯ ЧАСТОТИ Й ПОТУЖНОСТІ
7.1. Призначення й функції САРПЧ
7.2. Структурна схема САРПЧ
Головним завданням САРПЧє автоматичне забезпечення запланованого сальдо обміну потужності й частоти системи, а також дати можливість диспетчерові виконувати диспетчеризацію й економічне регулювання генерації, беручи до уваги вимоги до резервів, як у нормальних, так і в аварійних умовах.
Повинні бути забезпечені основні можливості, які є важливими для контролю, диспетчеризації й керування генерацією, включаючи: операторський інтерфейс із можливостями контролю, аварійної сигналізації/реєстрації аварійних повідомлень.
Основні вимоги до функцій САРПЧ:
· інформацію про виміри перетоків потужності в граничних пунктах і стан комутуючих пристроїв брати з бази даних реального часу оперативно-інформаційного комплексу (ОІК);
· циклічність передачі даних 1 сек.;
· перевірка й достоверізація (вибір достовірного значення параметру з найвищим пріоритетом при надходженні інформації з декількох вимірювальних пунктів) вимірювальних даних;
· пропорційно - інтегральний закон регулювання;
· регулювання або частоти, або сальдо перетіканнь, або комбінація цих двох змінних;
· інтегрування в часі відхилень між дійсним і плановим обміном потужності;
· створення бази даних процесу регулювання;
· ведення архіву бази даних;
· розрахунок помилки регулювання (АСІ) відповідності до рівняння:
АСІ = ∆Р ± К*∆f,
де: ∆Р - відхилення фактичного сальдо обміну потужності від запланованого, К - коефіцієнт потужності й частоти, ∆f - відхилення фактичної частоти від базової;
· генерація керуючого сигналу;
· посилка на об'єкт заданої базової частоти й керуючого сигналу, на вибір користувача, з інтервалом від 2 до 30 секунд;
· блокування посилки керуючого сигналу при виявленні неправильної роботи системи;
· візуалізація регулювального процесу на терміналі;
· самоконтроль правильності роботи системи в цілому;
· обмін інформацією з ЕАСС у Варшаві;
· можливість ручного введення:
o заданої потужності обміну,
o базової частоти,
o статичних і динамічних параметрів регулятора;
· можливість інтервенційної зміни керуючого сигналу незалежно від зміни, розрахованої алгоритмом регулятора;
· протокол передачі даних ІЕ 870-5-101;
· виміри частоти системи з точністю 1 мГц;
· точність вимірів активної потужності - 0,5%.
Структурну схему САРПЧ Західної ЕС наведено на рис. 7.1:
ДП — диспетчерський пункт;
ОІК — оперативно-інформаційний комплекс;
КОТ — ПУ телемеханіки;
АРМ — автоматизоване робоче місце;
М — модем зв’вязку.
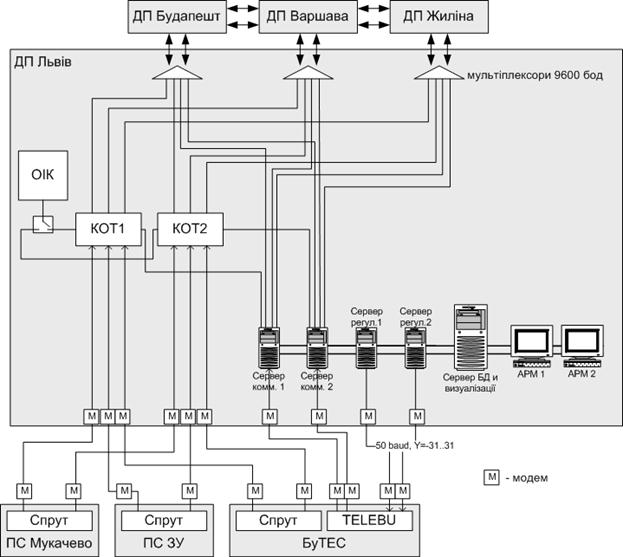
Рис. 7.1 – Структурна схема САРПЧ Західної енергосистеми
8. АВТОМАТИЗОВАНІ СИСТЕМИ ДИСПЕТЧЕРСЬКОГО управління РІВНЯ району електричних мереж (РЕМ)
8.1. Завдання й функції
8.2. Склад і структурна схема
8.3. Телемеханіка та система передавання даних (СПД)

