Повторюваність турбулентності у стратосфері менше чим у тропосфері, але вона завжди виникає при ясному небі і внаслідок своєї раптовості є надзвичайно небезпечною, тому що НТЛ у фазі крейсерського польоту може вийти на закритичний кут атаки.
Атмосферна турбулентність впливає на НТЛ під час всіх фаз польоту, особливо при переході до надзвукової швидкості. Протягом цієї фази небажаний будь-який сторонній вплив на літак, бо це може викликати додаткове перевантаження та змінити висоту і швидкість польоту. Тому перехід треба здійснювати поза купчасто-дощовими хмарами і поза зонами великих градієнтів температури та швидкості вітру.
В результаті дослідження більше 4000 польотів НТЛ над різними регіонами СНД виявлено що:
1. для зустрічі з випадком бовтанки треба пролетіти 7000 км;
2. для зустрічі з помірною та сильною бовтанкою – 11400 км;
3. для зустрічі з сильною та дуже сильною бовтанкою – 33000 км;
4. середня повторюваність бовтанки без обліку її інтенсивності на висоті 20 км складає 9,6 %, хоч частіше зустрічається слабка або помірна бовтанка;
5. повторюваність сильної та дуже сильної бовтанки – 2,2 %;
6. найбільша повторюваність бовтанки у стратосфері спостерігається взимку, а найменша – влітку;
7. довжина зон з бовтанкою коливається від 13 до 250 км, але найбільш імовірна – 62 км;
8. турбулентність більш інтенсивна при довжині зони бовтанки від 25 до 100 км;
9. товщина зон з бовтанкою у стратосфері в 74 % випадків не більше 300 м, в окремих випадках – не більш 1000 м;
З висотою зменшується інтенсивність турбулентності, та у середньому на висотах 18…21 км швидкість вертикальних поривів в 2-3 рази більша ніж у межах 6…12 км.
Розглянемо умови обледеніння НТЛ. Як відомо, обледеніння дозвукових літаків відбувається при температурі повітря нижче -10 °С в переохолоджених хмарах. Інтенсивність обледеніння залежить від водності хмар та швидкості літака. Водність хмар зменшується зі зниженням температури, що зменшує інтенсивність обледеніння літака. Тобто температура повітря присутня у непрямому вигляді.
На інтенсивність обледеніння ПС впливає різниця температур літака та повітря. Повторюваність обледеніння дозвукових літаків з швидкістю менше 600 км×год-1 у 6 разів більше, ніж у літаків з великою швидкістю.
Теоретично можливе обледеніння НТЛ під час всіх фаз польоту крім третьої. Якщо НТЛ протягом першої фази набирає висоту з швидкістю 720 км×год-1, то обледеніння можливе тільки при температурі меншій за -12 °С. Повторюваність обледеніння дозвукового літаку при температурі меншій за -12 °С складає приблизно 20…30 %. Зі зниженням температури повторюваність обледеніння швидко зменшується, і вже при температурі менше за -20 °С складає тільки 10 %.
Під час другої фази польоту НТЛ здійснює перехід від дозвукової швидкості до надзвукової. Ця фаза здійснюється на висотах від 10 до 15 км. На нижчій межі цього шару швидкість НТЛ складає 950 км×год-1, що нижче швидкості звуку, на верхній межі - 1300 км×год-1. Таким чином, на нижній межі шару під час другої фази обледеніння можливе тільки при температурі менше за -20 °С, що малоймовірно. На верхній межі при швидкості польоту 1300 км×год-1 обледеніння можливе тільки при температурі меншій за -39 °С.
На протязі крейсерського польоту (третя фаза) обледеніння практично та теоретично неможливе.
Найбільш небезпечна для обледеніння п’ята фаза (заходження на посадку), тут воно може тривати 5…10 хв.
СТАТИСТИЧНІ МОДЕЛІ
Динаміка екологічних процесів, як правило, дуже складна і контролюється великою кількістю різних впливових факторів t1, t2, t3, ….., tn значна частина з яких нестабільна, внаслідок чого істотність впливу кожного з них невпинно змінюється, причому часто незалежно від інших чинників. За цих умов кількісні характеристики процесу хаотично змінюються навколо деяких своїх середніх значень, тому, взагалі кажучи, його не вдається описати якоюсь цілком певною функціональною залежністю і, таким чином, спрогнозувати його майбутній розвиток у найдрібніших деталях. Проте часто стратегія розвитку багатофакторного процесу, яка задається сукупністю середніх значень його параметрів як функцій часу, в цілому визначається одним або декількома домінуючими чинниками t1, t2, t3, ….., tk, тоді як інші створюють лише більші чи менші хаотичні відхилення від генеральної лінії його розвитку, що їх називають флуктуаціями.
В усіх таких випадках для моделювання процесу вдаються до застосування математико-статистичних методів. При побудові статистичної моделі досліджуваного процесу збирають експериментальні дані про певні його параметри Х{, Х2, ... Хp, одночасно фіксуючи значення найбільш вагомих факторів впливу t1, t2, t3, ….., tm. Модель процесу будують на основі уявлень про випадкові події та величини, які покладено в основу теорії ймовірностей і математичної статистики.
Головною метою статистичного моделювання в екології є побудова статистичних прогнозів для модельованого процесу. Для цього припускають, що залежність досліджуваної величини X від контрольованих факторів впливу t1 t2, ... tn є достовірною (цілком детермінованою) і описується деякою невідомою функцією f(t1 t2 ... tn), а сукупний вплив усіх інших факторів внаслідок їх множинності є випадковим і викликає хаотичні нормально розподілені флуктуації ∆ величини X.
X = f(t1 t2 ... tn) + ∆
Найпростішим випадком статистичної моделі є модель однофакторного процесу. У цьому випадку роль домінуючим вважається один єдиний фактор t, тому ту чи іншу характеристику X системи подають у вигляді:
X = f(t)+ ∆
де ∆ — випадкове незалежне від t відхилення, викликане різними причинами: похибками вимірювання, впливом кліматичних і погодних факторів, тощо. f(t) функція регресії X на t.
Задачі статистичного моделювання.
Основними задачами статистичного моделювання є:
—визначення виду функції регресії Х на t, тобто визначення детермінованої складової величини Х вумовах, коли фактор t контролюється повністю, шляхом статистичної обробки емпіричної бази даних;
—визначення параметрів функції регресії.
В екології найчастіше вимірюють залежність деякої величини від часу в одній і тій самій точці земної поверхні, русла річки тощо або шукають неперервну функцію розподілу цієї величини уздовж поверхні чи уздовж стоку води за дискретними даними, отриманим в окремих точках.
База даних — це упорядкований набір експериментальних даних, сформований шляхом одночасного вимірювання Х і t чи вимірювання X у певні моменти t і поданий у вигляді масиву даних {Хк, tk}. В однофакторному аналізі tk — це число; у багатофакторному аналізі tk — це впорядкована множина чисел.
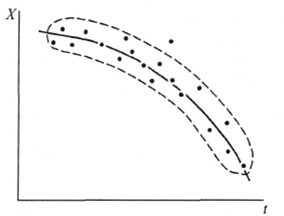
Отже, у випадку однофакторного аналізу база даних має вигляд таблиці:

Нанесена на координатну площину, вона утворює відповідне кореляційне поле (дивись рис.).
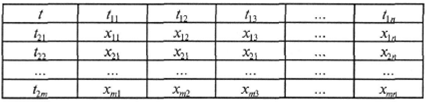
У випадку двохфакторного аналізу таблицю бази даних записують так:
Методи визначення функції регресії:
а) графічний метод — визначення виду функції регресії f(t) за зовнішнім виглядом кореляційного поля;
б) аналітичний метод апроксимації залежності f(t) поліномом (за допомогою методу найменших квадратів);
в) графоаналітичний метод, який поєднує в собі графічний та аналітичний методи.

