Самый простой логический элемент — это инвертор (логический элемент НЕ, "inverter"), уже упоминавшийся в первой лекции. Инвертор выполняет простейшую логическую функцию — инвертирование, то есть изменение уровня входного сигнала на противоположный. Он имеет всего один вход и один выход. Выход инвертора может быть типа 2С или типа ОК. На рис. 3.1 показаны условные обозначения инвертора, принятые у нас и за рубежом, а в табл. 3.1 представлена таблица истинности инвертора.
Рис. 3.1. Условные обозначения инверторов: зарубежные (слева) и отечественные (справа)
В одном корпусе микросхемы обычно бывает шесть инверторов. Отечественное обозначение микросхем инверторов — "ЛН". Примеры: КР1533ЛН1 (SN74ALS04) — шесть инверторов с выходом 2С, КР1533ЛН2 (SN74ALS05) — шесть инверторов с выходом ОК. Существуют также инверторы с выходом ОК и с повышенным выходным током (ЛН4), а также с повышенным выходным напряжением (ЛН3, ЛН5). Для инверторов с выходом ОК необходимо включение выходного нагрузочного резистора pull-up. Его минимальную величину можно рассчитать очень просто: R < U/IOL, где U — напряжение питания, к которому подключается резистор. Обычно величина резистора выбирается порядка сотен Ом — единиц кОм.
Таблица 3.1. Таблица истинности инвертора
Вход
Выход
Две основные области применения инверторов — это изменение полярности сигнала и изменение полярности фронта сигнала (рис. 3.2). То есть из положительного входного сигнала инвертор делает отрицательный выходной сигнал и наоборот, а из положительного фронта входного сигнала — отрицательный фронт выходного сигнала и наоборот. Еще одно важное применение инвертора — буферирование сигнала (с инверсией), то есть увеличение нагрузочной способности сигнала. Это бывает нужно в том случае, когда какой-то сигнал надо подать на много входов, а выходной ток источника сигнала недостаточен.
Рис. 3.2. Инверсия полярности сигнала и инверсия полярности фронта сигнала
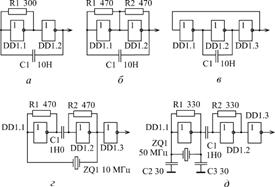
Именно инвертор, как наиболее простой элемент, чаще других элементов используется в нестандартных включениях. Например, инверторы обычно применяются в схемах генераторов прямоугольных импульсов (рис. 3.3), выходной сигнал которых периодически меняется с нулевого уровня на единичный и обратно. Все приведенные схемы, кроме схемы д, выполнены на элементах К155ЛН1, но могут быть реализованы и на инверторах других серий при соответствующем изменении номиналов резисторов. Например, для серии К555 номиналы резисторов увеличиваются примерно втрое. Схема д выполнена на элементах КР531ЛН1, так как она требует высокого быстродействия инверторов.
Рис. 3.3. Схемы генераторов импульсов на инверторах
Схемы а, б и в представляют собой обычные RC-генераторы, характеристики которых (выходную частоту, длительность импульса) можно рассчитать только приблизительно. Для схем а и б при указанных номиналах резистора и конденсатора частота генерации составит порядка 100 кГц, для схемы в — около 1 МГц. Эти схемы рекомендуется использовать только в тех случаях, когда частота не слишком важна, а важен сам факт генерации. Если же точное значение частоты принципиально, то рекомендуется применять схемы г и д, в которых частота выходного сигнала определяется только характеристиками кварцевого резонатора. Схема г используется для кварцевого резонатора, работающего на первой (основной) гармонике. Величину емкости можно оценить по формуле:
C>1/(2RF)
где F — частота генерации. Схема д применяется для гармониковых кварцевых резонаторов, которые работают на частоте, большей основной в 3, 5, 7 раз (это бывает нужно для частот генерации выше 20 МГц).
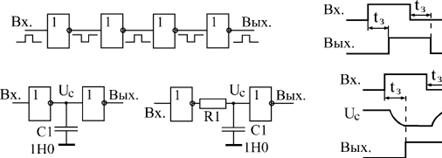
Рис. 3.4. Использование инверторов для задержки сигнала
Инверторы также применяются в тех случаях, когда необходимо получить задержку сигнала, правда, незначительную (от 5 до 100 нс). Для получения такой задержки последовательно включается нужное количество инверторов (рис. 3.4, вверху). Суммарное время задержки, например, для четырех инверторов, можно оценить по формуле
tЗ = 2tPHL + 2tPLH
Правда, надо учитывать, что обычно реальные задержки элементов оказываются существенно ниже (иногда даже вдвое), чем табличные параметры tPHL и tPLH. То есть о точном значении получаемой задержки говорить не приходится, ее можно оценить только примерно.
Для задержки сигнала используются также конденсаторы (рис. 3.4, внизу). При этом задержка возникает из-за медленного заряда и разряда конденсатора (напряжение на конденсаторе — UC). Схема без резистора (слева на рисунке) дает задержку около 100 нс. В схеме с резистором (справа на рисунке) номинал резистора должен быть порядка сотен Ом. Но при выборе таких схем с конденсаторами надо учитывать, что некоторые серии микросхем (например, КР1533) плохо работают с затянутыми фронтами входных сигналов. Кроме того, надо учитывать, что количество времязадающих конденсаторов в схеме обратно пропорционально уровню мастерства разработчика схемы.
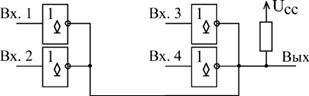
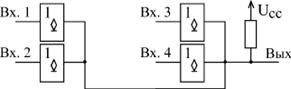
Наконец, еще одно применение инверторов, но только с выходом ОК, состоит в построении на их основе так называемых элементов "Проводного ИЛИ". Для этого выходы нескольких инверторов с выходами ОК объединяются, и через резистор присоединяются к источнику питания (рис. 3.5). Выходом схемы является объединенный выход всех элементов. Такая конструкция выполняет логическую функцию ИЛИ-НЕ, то есть на выходе будет сигнал логической единицы только при нулях на всех входах. Но о логических функциях подробнее будет рассказано далее.
Рис. 3.5. Объединение выходов инверторов с ОК для функции ИЛИ-НЕ
В заключение раздела надо отметить, что инверсия сигнала применяется и внутри более сложных логических элементов, а также внутри цифровых микросхем, выполняющих сложные функции.
Повторители и буферы
Повторители и буферы отличаются от инверторов прежде всего тем, что они не инвертируют сигнал (правда, существуют и инвертирующие буферы). Зачем же тогда они нужны? Во-первых, они выполняют функцию увеличения нагрузочной способности сигнала, то есть позволяют подавать один сигнал на много входов. Для этого имеются буферы с повышенным выходным током и выходом 2С, например, ЛП16 (шесть буферных повторителей). Во-вторых, большинство буферов имеют выход ОК или 3С, что позволяет использовать их для получения двунаправленных линий или для мультиплексирования сигналов. Поясним подробнее эти термины.
Рис. 3.6. Двунаправленная линия
Под двунаправленными линиями понимаются такие линии (провода), сигналы по которым могут распространяться в двух противоположных направлениях. В отличие от однонаправленных линий, которые идут от одного выхода к одному или нескольким входам, к двунаправленной линии могут одновременно подключаться несколько выходов и несколько входов (рис. 3.6). Понятно, что двунаправленные линии могут организовываться только на основе выходов ОК или 3С. Поэтому почти все буферы имеют именно такие выходы.
Рис. 3.7. Однонаправленная мультиплексированная линия на основе буферов
Мультиплексированием называется передача разных сигналов по одним и тем же линиям в разные моменты времени. Основная цель мультиплексирования состоит в сокращении общего количества соединительных линий. Двунаправленная линия обязательно является мультиплексированной, а мультиплексированная линия может быть как однонаправленной, так и двунаправленной. Но в любом случае к ней присоединяется несколько выходов, только один из которых в каждый момент времени находится в активном состоянии. Остальные выходы в это время отключаются (переводятся в пассивное состояние). В отличие от двунаправленной линии, к мультиплексированной линии, построенной на основе буферов, может быть подключен всего лишь один вход, но обязательно несколько выходов с ОК или 3С (рис. 3.7). Мультиплексированные линии могут строиться не только на буферах, но и на микросхемах мультиплексоров, которые будут рассмотрены в лекциях 5, 6.
Рис. 3.8. Объединение выходов буферов с ОК
Примером буферов с выходом ОК является микросхема ЛП17 (шесть буферов о ОК). Точно так же, как и в случае инверторов с ОК (см. рис. 3.5), выходы нескольких буферов с ОК могут объединяться для получения функции "Монтажное И", то есть на выходе будет сигнал логической единицы только при единицах на всех входах (рис. 3.8). То есть реализуется многовходовой элемент И.
Буферы с выходом 3С представлены гораздо большим количеством микросхем, например, ЛП8, ЛП11, АП5, АП6, АП14. Эти буферы обязательно имеют управляющий вход EZ (или OE), переводящий выходы в третье, пассивное состояние. Как правило, третьему состоянию соответствует единица на этом входе, а активному состоянию выходов — нуль, то есть сигнал EZ имеет отрицательную полярность.
Буферы бывают однонаправленные или двунаправленные, с инверсией или без инверсии сигналов, с управлением всеми выходами одновременно или с управлением группами выходов. Всем этим и определяется большое разнообразие микросхем буферов.
Таблица 3.2. Таблица истинности буфера без инверсии
Вход
-EZ
Выход
3C
3C
Простейшим однонаправленным буфером без инверсии является микросхема ЛП8 (четыре буфера с выходами типа 3С и раздельным управлением). Каждый из четырех буферов имеет свой вход разрешения EZ. Таблица истинности буфера очень проста (табл. 3.2): при нулевом сигнале на входе управления выход повторяет вход, а при единичном — выход отключен. Эту микросхему удобно применять для обработки одиночных сигналов, то есть для повторения входного сигнала с возможностью отключения выхода.
Рис. 3.9. Применение буфера с 3С в качестве буфера с ОК
Эти же буферы иногда удобно использовать для замещения буферов с выходом ОК (рис. 3.9). В этом случае вход управления служит информационным входом. При нуле на входе мы получаем нуль на выходе, а при единице на входе — третье состояние на выходе.
Рис. 3.10. Мультиплексирование двух входных кодов с помощью буферов с 3С
Очень часто надо обрабатывать не одиночные сигналы, а группы сигналов, например, сигналы, передающие многоразрядные коды. В этом случае удобно применять буферы с групповым управлением, То есть имеющие один вход разрешения EZ для нескольких выходов. Примерами могут служить микросхемы ЛП11 (шесть буферов, разделенные на две группы: четыре и два буфера, для каждой из которых имеется свой вход управления) и АП5 (восемь буферов, разделенные на две группы по четыре буфера, каждая из которых имеет свой вход управления).
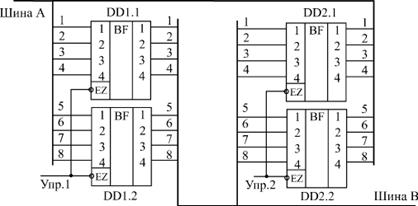
На рис. 3.10 показан пример мультиплексирования двух восьмиразрядных кодов с помощью двух микросхем АП5. Одноименные выходы обеих микросхем объединены между собой. Пропускание на выход каждого из двух входных кодов разрешается своим управляющим сигналом (Упр. 1 и Упр. 2), причем должен быть исключен одновременный приход этих двух сигналов, чтобы не было конфликтов на выходах.
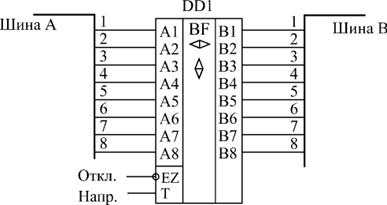
Рис. 3.11. Включение двунаправленного буфера
Двунаправленные буферы, в отличие от однонаправленных, позволяют передавать сигналы в обоих направлениях. В зависимости от специального управляющего сигнала T (другое обозначение — BD), входы могут становиться выходами и наоборот: выходы — входами. Обязательно имеется и вход управления третьим состоянием EZ, который может отключить как входы, так и выходы.
На рис. 3.11 для примера показан двунаправленный буфер АП6, который может передавать данные между двумя двунаправленными шинами А и B в обоих направлениях. При единичном уровне на управляющем входе Т (сигнал Напр.) данные передаются из шины A в шину B, а при нулевом уровне — из шины B в шину A (табл. 3.3). Единичный уровень на управляющем входе EZ (сигнал Откл.) отключает микросхему от обеих шин.
Двунаправленную передачу можно организовать и на основе однонаправленных буферов. На рис. 3.12 показано, как это можно сделать на двух микросхемах АП5. Здесь при нулевом сигнале Упр. 1 информация будет передаваться с шины А на шину В, а при нулевом сигнале на входе Упр. 2 — с шины В на шину А. Если оба входа Упр. 1 и Упр. 2 находятся в единичном состоянии, то шины A и В отключены друг от друга, а подача нулей на оба входа Упр. 1 и Упр. 2 должна быть исключена, иначе состояние обеих шин А и В будет не определено.
Рис. 3.12. Организация двунаправленной передачи с помощью однонаправленных буферов
Микросхемы буферов в отечественных сериях имеют разнообразные обозначения: ЛН, ЛП, АП, ИП, что порой затрудняет их выбор. Например, ЛН6, ЛП8, ЛП11, АП5, АП6, ИП5, ИП6. Буферы с буквами ЛН имеют инверсию, буферы АП и ИП могут быть с инверсией и без инверсии. Все параметры у буферов довольно близки, отличие — в инверсии, в количестве разрядов и в управляющих сигналах.
Временные параметры буферов включают помимо задержки сигнала от информационного входа до информационного выхода, также задержки перехода выхода в третье состояние и из третьего состояния в активное состояние (tPHZ, tPLZ и tPZH, tPZL). Величины этих задержек обычно примерно вдвое больше, чем величины задержек между информационным входом и выходом.
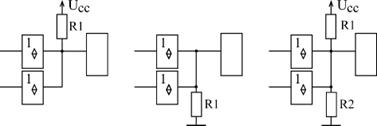
Отключаемый выход буферов (как ОК, так и 3С) требует применения нагрузочных резисторов. В противном случае вход, подключенный к отключенному выходу, оказывается подвешенным, в результате чего схема может работать неустойчиво, давать сбои. Подключение резистора в случае выхода ОК (pull-up) производится стандартным способом (см. рис. 3.8). Точно так же может быть включен резистор между выходом 3С и напряжением питания (рис. 3.13), тогда при отключенном выходе на вход будет поступать уровень логической единицы. Однако можно включить и резистор между выходом и землей, тогда при отключенном выходе на вход будет поступать сигнал логического нуля. Применяется также и включение двух резисторов (резистивного делителя), при этом величина верхнего резистора (присоединенного к шине питания) обычно выбирается в 2–3 раза меньше, чем нижнего резистора (присоединенного к "земле"), а величина параллельного соединенных двух резисторов выбирается равной примерно 100 Ом. Например, резисторы могут иметь номиналы 240 Ом и 120 Ом, 360 Ом и 130 Ом. Отключенный выход воспринимается в данном случае присоединенным к нему входом как единица.
Рис. 3.13. Включение резисторов на выходе буферов 3С
Иногда к выходам 3С резисторы не присоединяют вообще, но в этом случае надо обеспечить, чтобы последующий вход воспринимал сигнал с выхода 3С (то есть реагировал на него) только тогда, когда выход находится в активном состоянии. Иначе возможны сбои и отказы в работе устройства.
Рис. 3.14. Применение буферов для индикации
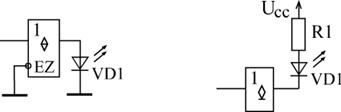
Еще одно типичное применение буферов, связанное с их большими выходными токами, — это светодиодная индикация. Светодиоды могут подключаться к выходу буферов двумя основными способами (рис. 3.14). При первом из них (слева на рисунке) светодиод горит, когда на выходе 3С или 2С-сигнал логической единицы, а при втором (справа на рисунке) — когда на выходе ОК сигнал логического нуля. Величина резистора выбирается исходя из характеристик светодиода, но обычно составляет порядка 1 кОм.
Элементы И, И-НЕ, ИЛИ, ИЛИ-НЕ
Следующий шаг на пути усложнения компонентов цифровой электроники — это элементы, выполняющие простейшие логические функции. Объединяет все эти элементы то, что у них есть несколько равноправных входов (от 2 до 12) и один выход, сигнал на котором определяется комбинацией входных сигналов.
Самые распространенные логические функции — это И (в отечественной системе обозначений — ЛИ), И-НЕ (обозначается ЛА), ИЛИ (обозначается ЛЛ) и ИЛИ-НЕ (обозначается ЛЛ). Присутствие слова НЕ в названии элемента обозначает только одно — встроенную инверсию сигнала. В международной системе обозначений используются следующие сокращения: AND — функция И, NAND — функция И-НЕ, OR — функция ИЛИ, NOR — функция ИЛИ-НЕ.
Название самих функций И и ИЛИ говорит о том, при каком условии на входах появляется сигнал на выходе. При этом важно помнить, что речь в данном случае идет о положительной логике, о положительных, единичных сигналах на входах и на выходе.
Элемент И формирует на выходе единицу тогда и только тогда, если на всех его входах (и на первом, и на втором, и на третьем и т.д.) присутствуют единицы. Если речь идет об элементе И-НЕ, то на выходе формируется нуль, когда на всех входах — единицы (табл. 3.4). Цифра перед названием функции говорит о количестве входов элемента. Например, 8И-НЕ — это восьмивходовой элемент И с инверсией на выходе.
Таблица 3.4. Таблица истинности двухвходовых элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ
Вход 1
Вход 2
Выход И
Выход И-НЕ
Выход ИЛИ
Выход ИЛИ-НЕ
Элемент ИЛИ формирует на выходе нуль тогда и только тогда, если на всех входах нуль. Элемент ИЛИ-НЕ дает на выходе нуль при наличии хотя бы на одном из входов единицы (табл. 3.4). Пример обозначения: 4ИЛИ-НЕ — четырехвходовой элемент ИЛИ с инверсией на выходе.
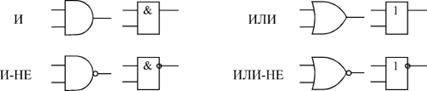
Рис. 3.15. Обозначения элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ: зарубежные (слева) и отечественные (справа)
Отечественные и зарубежные обозначения на схемах двухвходовых элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ показаны на рис. 3.15. Все эти элементы бывают с выходами типа 2С, ОК и 3С. В последнем случае обязательно имеется вход разрешения –EZ.
Нетрудно заметить (см. табл. 3.4), что в случае отрицательной логики, при нулевых входных и выходных сигналах, элемент И выполняет функцию ИЛИ, то есть на выходе будет нуль в случае, когда хотя бы на одном из входов нуль. А элемент ИЛИ при отрицательной логике выполняет функцию И, то есть на выходе будет нуль только тогда, когда на всех входах присутствуют нули. И так как в реальных электронных устройствах сигналы могут быть любой полярности (как положительные, так и отрицательные), то надо всегда очень аккуратно выбирать требуемый в каждом конкретном случае элемент. Особенно об этом важно помнить тогда, когда последовательно соединяются несколько разноименных логических элементов с инверсией и без нее для получения сложной функции.
Поэтому элементы И, И-НЕ, ИЛИ, ИЛИ-НЕ разработчику далеко не всегда удобно применять именно как выполняющие указанные в их названии логические функции. Иногда их удобнее использовать как элементы разрешения/запрещения или смешивания/совпадения. Но сначала мы рассмотрим случаи реализации именно логических функций на этих элементах.
На рис. 3.16 приведены примеры формирования элементами выходных сигналов на основании требуемых временных диаграмм входных и выходных сигналов. В случае а выходной сигнал должен быть равен единице при двух единичных входных сигналах, следовательно, достаточно элемента 2И. В случае б выходной сигнал должен быть равен нулю, когда хотя бы один из входных сигналов равен единице, следовательно, требуется элемент 2ИЛИ-НЕ. Наконец, в случае в выходной сигнал должен быть равен нулю при одновременном приходе единичного сигнала Вх. 1, нулевого сигнала Вх. 2 и единичного сигнала Вх. 3. Следовательно, требуется элемент 3И-НЕ, причем сигнал Вх. 2 надо предварительно проинвертировать.
Рис. 3.16. Примеры применения элементов И и ИЛИ
Любой из логических элементов рассматриваемой группы можно рассматривать как управляемый пропускатель входного сигнала (с инверсией или без нее).
Например, в случае элемента 2И-НЕ один из входов можно считать информационным, а другой — управляющим. В этом случае при единице на управляющем входе выходной сигнал будет равен проинвертированному входному сигналу, а при нуле на управляющем входе выходной сигнал будет постоянно равен единице, то есть прохождение входного сигнала будет запрещено. Элементы 2И-НЕ с выходом ОК часто используют именно в качестве управляемых буферов для работы на мультиплексированную или двунаправленную линию.
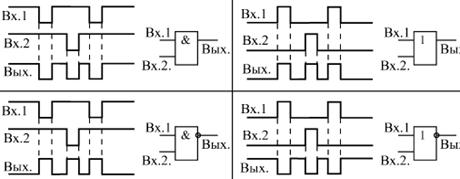
Точно так же в качестве элемента разрешения/запрещения могут применяться элементы И, ИЛИ, ИЛИ-НЕ (рис. 3.17). Разница между элементами состоит только в полярности управляющего сигнала, в инверсии (или ее отсутствии) входного сигнала, а также в уровне выходного сигнала (нуль или единица) при запрещении прохождения входного сигнала.
Рис. 3.17. Разрешение/запрещение прохождения сигналов на элементах И, И-НЕ, ИЛИ, ИЛИ-НЕ
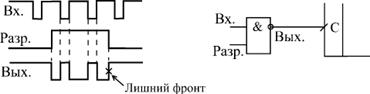
Рис. 3.18. Появление лишнего фронта при запрещении входного сигнала
При использовании элементов разрешения/запрещения могут возникнуть дополнительные проблемы в случае, когда сигнал с выхода элемента идет на вход, реагирующий на фронт сигнала. В момент перехода из состояния разрешения в состояние запрещения и из состояния запрещения в состояние разрешения в выходном сигнале может появиться дополнительный фронт, никак не связанный с входным сигналом (рис. 3.18). Чтобы этого не произошло, надо придерживаться следующего простого правила: если вход реагирует на положительный фронт, то в состоянии запрещения на выходе элемента должен быть нуль, и наоборот.
Иногда необходимо реализовать функцию смешивания двух сигналов той или иной полярности. То есть выходной сигнал должен вырабатываться как при приходе одного входного сигнала, так и при приходе другого входного сигнала. Если оба входных сигнала положительные и выходной сигнал положительный, то мы имеем в чистом виде функцию ИЛИ, и требуется элемент 2ИЛИ. Однако при отрицательных входных сигналах и отрицательном выходном сигнале для такого же смешивания понадобится уже элемент 2И. А если полярность входных сигналов не совпадает с нужной полярностью выходного сигнала, то нужны уже элементы с инверсией (И-НЕ при положительных выходных сигналах и ИЛИ-НЕ при отрицательных выходных сигналах). На рис. 3.19 показаны варианты смешивания на разных элементах.
Рис. 3.19. Реализация смешивания двух сигналов
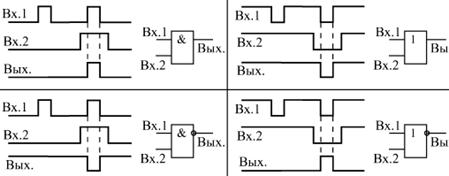
Наконец, рассматриваемые элементы И, И-НЕ, ИЛИ, ИЛИ-НЕ иногда бывает удобно применять в качестве схем совпадения различных сигналов. То есть выходной сигнал должен вырабатываться тогда, когда сигналы на входах совпадают (приходят одновременно). Если же совпадения нет, то выходной сигнал должен отсутствовать. На рис. 3.20 показаны варианты таких схем совпадения на четырех разных элементах. Различаются они полярностями входных сигналов, а также наличием или отсутствием инверсии выходного сигнала.
Рис. 3.20. Схемы совпадения двух сигналов
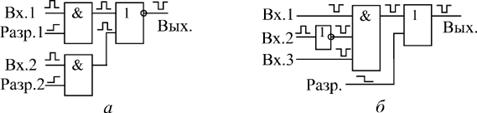
Рассмотрим два примера совместного использования элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ (рис. 3.21).
Рис. 3.21. Примеры совместного использования элементов
Пусть необходимо смешать два сигнала, каждый из которых может быть разрешен или запрещен. Пусть полярность входных сигналов и сигналов разрешения — положительная, а выходной сигнал должен быть отрицательным. В этом случае надо взять два двухвходовых элемента И и смешать их выходные сигналы с помощью двухвходового элемента ИЛИ-НЕ (а).
Пусть необходимо смешать два отрицательных сигнала и один положительный сигнал, причем результирующий сигнал может быть разрешен или запрещен. Полярность сигнала разрешения — отрицательная, полярность выходного сигнала — отрицательная. Для этого нужно взять трехвходовой элемент И, инвертор для отрицательного входного сигнала и двухвходовой элемент ИЛИ (б).
Элементы И, И-НЕ, ИЛИ, ИЛИ-НЕ могут использоваться также в качестве инверторов или повторителей (рис. 3.22), для чего необходимо объединить входы или на неиспользуемые входы подать сигнал нужного уровня. Второе предпочтительнее, так как объединение входов не только увеличивает входной ток, но и несколько снижает быстродействие элементов.
Рис. 3.22. Инверторы и повторители
Рис. 3.23. Объединение по И входов микросхем
По функции И часто объединяются входы более сложных микросхем. Иначе говоря, какая-то функция выполняется только тогда, когда на все объединенные по И входы поступают сигналы нужной полярности. Чаще всего по И объединяются входы выбора микросхемы CS и входы управления третьим состоянием выхода микросхемы EZ. На рис. 3.23 показано три примера такого объединения по И. При этом надо учитывать, что на инверсные входы для выполнения функции должны поступать нулевые сигналы, а на прямые входы — единичные сигналы. Примерами могут служить микросхемы КР556РТ4, КР556РТ5, КР1533АП14, КР1533АП15.
До сих пор, рассматривая элементы И, И-НЕ, ИЛИ, ИЛИ-НЕ, мы не выходили за рамки первого уровня представления (логической модели). Это вполне допустимо в том случае, когда входные сигналы элементов не меняются одновременно или почти одновременно, когда их фронты разнесены во времени существенно (больше, чем на время задержки элемента). При одновременном изменении входных сигналов все будет гораздо сложнее необходимо привлекать второй и порой третий уровень представления. В момент изменения входных сигналов выходной сигнал становится неопределенным, нестабильным, непредсказуемым. В результате при неправильном проектировании может не работать вся сложная схема, целый прибор или даже большая система.
Например, возьмем логический элемент 2И-НЕ. Пусть на его входы приходят сигналы, изменяющиеся одновременно, причем в противофазе, то есть один переключается из нуля в единицу, а другой — из единицы в нуль. Пусть по тем или иным причинам (вследствие передачи по проводам, вследствие разных задержек элементов и т.д.) один из сигналов чуть-чуть сдвинулся во времени относительно другого (рис. 3.24). При этом на двух входах в течение кратковременного периода будет присутствовать два единичных сигнала. В результате выход начнет переключаться из единицы в нуль. Он может успеть переключиться, и тогда сформируется короткий импульс. Он может не успеть переключиться, и тогда импульса не будет. Он может иногда успевать переключиться, а иногда не успевать, и тогда выходной импульс то будет появляться, то не будет. Здесь все зависит от быстродействия элемента и величины задержки. Последняя ситуация наиболее неприятна, так как может вызвать нестабильную неисправность, выявить которую крайне сложно.
Рис. 3.24. Короткий импульс на выходе элемента 2И-НЕ
На этапе проектирования схемы бороться с такими паразитными импульсами довольно просто: надо всего лишь обеспечить, чтобы вся дальнейшая схема на них не реагировала, например, отключалась на некоторое время после изменения входных сигналов элементов. То есть необходимо временное согласование, синхронизация различных элементов схемы.
В качестве примера возьмем одно из самых распространенных применений рассматриваемых элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ — селектирование кодов. Суть селектирования сводится к следующему. Пусть имеется некоторая шина, по которой передаются коды. Необходимо выявить появление на этой шине какого-то определенного кода, то есть сформировать выходной сигнал, соответствующий требуемому входному коду.
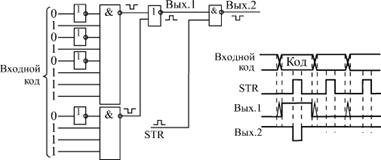
Рис. 3.25. Селектирование кодов со стробированием
Схема, выполняющая такую функцию, довольно проста (рис. 3.25). В ее основе — многовходовые элементы И-НЕ. При этом сигналы, соответствующие разрядам кода, на которых должны быть единицы, подаются непосредственно на входы элементов И-НЕ. А сигналы, соответствующие разрядам кода, на которых должны быть нули, подаются на входы элементов И-НЕ через инверторы. Выходные сигналы элементов И-НЕ объединяются с помощью элемента ИЛИ-НЕ. В результате на выходе элемента ИЛИ-НЕ формируется сигнал Вых. 1 в тот момент, когда на входе присутствует нужный код.
Однако в момент установления нужного кода и в момент его снятия возникает период неопределенности, когда в выходном сигнале могут быть короткие паразитные импульсы. Это связано как с неодновременным приходом различных разрядов, так и с внутренними задержками нашей схемы. Более того, короткие паразитные импульсы могут возникать на выходе и в том случае, когда любой входной код меняется на любой другой входной код, даже если оба эти кода не селектируются нашей схемой. То есть любое изменение кода всегда сопровождается периодом неопределенности в сигнале Вых. 1.
Как же добиться, чтобы выходной сигнал не имел паразитных импульсов, не имел периодов неопределенности? Для этого обычно используется стробирование или тактирование передаваемого кода. То есть, помимо кода, параллельно с ним передается стробирующий или тактирующий сигнал STR, задержанный во времени относительно кода. Активным этот сигнал становится тогда, когда все предыдущие переходные процессы уже завершены, все разряды кода установились в нужные уровни и схема, обрабатывающая код, тоже закончила свою работу. А пассивным он становится, пока еще не начались новые переходные процессы. Это называется вложенным циклом (то есть в нашем случае сигнал STR вложен в сигналы кода). В результате, если мы будем разрешать выходной сигнал нашей схемы Вых. 1 таким сигналом STR с помощью элемента 2И-НЕ, то получим сигнал Вых. 2, свободный от паразитных импульсов и периодов неопределенности.
Подробнее о синхронизации будет рассказано в следующих лекциях.
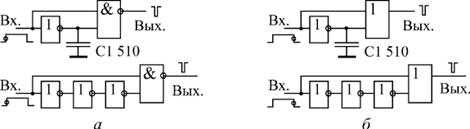
Однако бывают случаи, когда указанная особенность элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ формировать короткие импульсы при изменении входных сигналов оказывается очень полезной. Например, нам необходимо сформировать короткий импульс по положительному или отрицательному фронту имеющегося сигнала. Тогда этот сигнал инвертируют, специально задерживают с помощью цепочки элементов или емкости и подают исходный сигнал и задержанный сигнал на входы элемента (рис. 3.26).
Рис. 3.26. Формирователи коротких импульсов по фронту входного сигнала
Импульс по положительному фронту входного сигнала формируется на элементе 2И или 2И-НЕ (а), а импульс по отрицательному фронту входного сигнала — на элементе 2ИЛИ или 2ИЛИ-НЕ (б). Если элемент с инверсией, то выходной импульс будет отрицательным, если без инверсии, то положительным. При указанной на схемах величине емкости длительность импульса получается около 50 нс. Для увеличения длительности импульса надо увеличивать величину емкости или же количество инверторов в цепи задержки (при этом количество инверторов обязательно должно быть нечетным).



 Повторители и буферы
Повторители и буферы


 A
A