Простой гармонический осциллятор без трения. Динамика такой структурно-неустойчивой системы описывается уравнениями
x'' + C1 ⋅ x' + C2 ⋅ x = 0 x(0) = a x'(0) = 0
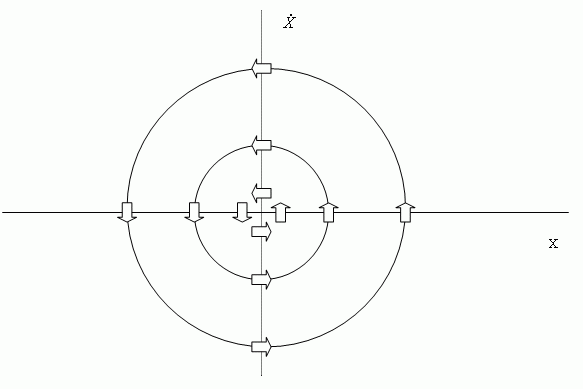
Нас будет интересовать влияние параметров C1 и с C2 на траекторию системы, причем из физических соображений ограничимся только случаями C1 ≥ 0, C2 > 0
Рис.8.3 — Траектории осциллятора без трения
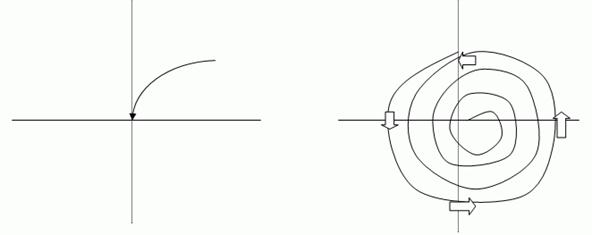
Рассматривая траекторию осциллятора на фазовой плоскости, легко видеть, что если C1 = 0, то все траектории являются концентрическими окружностями с центром в начале координат. Если «ввести» в систему трение, то математически это означает, что C1 > 0. Если C12 > 4 ⋅ C2, то точка равновесия х = 0 на плоскости есть узел, в противном случае это фокус.
Рис.8.4 — Фазовый портрет траектории системы на плоскости
В обоих случаях начало координат является положением устойчивого равновесия по отношению к возмущениям в C1 или C2. Эта ситуация резко контрастирует со случаем системы без трения (C1 = 0), когда начало координат есть центр и качественная картина поведения изменяется при сколь угодно малых изменениях C1. Таким образом, при C1 ≠ 0 система структурна устойчива в том смысле, что качественный характер положения равновесия (узел, фокус) сохраняется при малых изменениях структуры системы.
Поскольку идеи структурной устойчивости тесно связаны с поведением траекторий системы по мере приближения к ее состоянию равновесия, представляет интерес рассмотреть те области пространства состояний, которые соответствуют областям притяжения и отталкивания для данного состояния равновесия.
Иными словами, пусть задано равновесное состояние x*, для простоты считающееся фиксированным. Из каких начальных состояний система в конце концов придет в состояние x*? (Графически подобная ситуация изображена на рис.8.5)
Рис.8.5 — Область притяжения фиксированной точки в R 2
Если допустить, что равновесные состояния могут быть предельными циклами или периодическими траекториями, то даже в двумерном случае картина может быть довольно сложной. В случае более высокой размерности картина еще более запутана. Тем не менее вопрос об описании областей устойчивости и родственные вопросы, связанные со структурной устойчивостью, изучены достаточно глубоко.
Пример более сложной структурно неустойчивой системы. Антисимметричная система хищник-жертва.
Предположим, что m видов взаимодействуют с популяцией i-го вида, численность которой Ni(t). Пусть ai — коэффициент рождаемости i-го вида, а αij — коэффициент, характеризующий скорость уничтожения i-го вида j-м видом. Тогда динамика системы описывается уравнением Лотка-Вольтерра:
dNi(t)/dt = Ni(t) ⋅ [ai - ∑ αij ⋅ Nj(t)]
Нетривиальные равновесные популяции должны удовлетворять линейной системе алгебраических уравнений
∑αij ⋅ Nj* = ai
При неочевидном предположении, что матрица является антисимметричной, можно показать, что при смещении системы из любого равновесного состояния, ее поведение будет чисто колебательным, поскольку собственные значения кососимметрической матрицы чисто мнимые. Следует отметить, что данное предположение означает, что коэффициент биохимического преобразования одного грамма жертвы j-го вида одинаков для всех хищников i-го вида, т.е. этот коэффициент не зависит от вида поедаемых особей. Можно показать, что величина
Q = ∑[Ni(t) - Ni* ⋅ log(Ni(t))]
постоянна вдоль любой траектории системы.
Этот закон сохранения есть следствие колебательного характера поведения системы и является аналогом закона сохранения механической энергии простого гармонического осциллятора, рассмотренного выше. Однако, как только кососимметричность матрицы А нарушается, состояния равновесия системы становятся узлами или фокусами (устойчивыми или неустойчивыми). В этом случае введение в систему сколь угодно малых изменений нарушает качественный характер траекторий, поэтому данная система структурно неустойчива. Более того, антисимметрические модели применимы только к системам с четным числом видов, поскольку из антисимметричности следует, что собственные значения матрицы А есть комплексно сопряженные числа. Если 3m 0 нечетно, то действительное собственное значение матрицы А должно быть равным нулю, что приводит к вырожденности матрицы взаимодействий. Таким образом, данная система является структурно неустойчивой и в смысле вариации ее размерности.
Положение равновесных состояний и соответствующих областей притяжения зависит от динамики изучаемой системы, поэтому важно знать, как они изменяются при небольшом изменении самой системы. Вопрос относительно того, приведет ли такое изменение к смещению данного состояния системы в другую область притяжения, представляет большой практический интерес, поскольку это привело бы к резким качественным изменениям в дальнейшем поведении системы. В качестве одного из инструментов исследования таких вопросов может быть использована теория катастроф.
Обычно в теории катастроф предполагается, что поведением изучаемого процесса управляет некоторая потенциальная функция, локальные минимумы которой соответствуют равновесным состояниям. Очень важно иметь в виду, что при таком подходе не обязательно точно знать, что это за функция — достаточно признать лишь сам факт ее существования. Предположим, далее, что можно измерять значения некоторых выходных переменных, генерируемых системой в ответ на входные воздействия. В «элементарной» теории катастроф предполагается, что все равновесные выходы фиксированы, т.е. фиксируют значения входных параметров и ждут пока не наступит равновесное состояние. Затем изменяют значения входных параметров и снова ждут и т.д. Поступая таким образом, получают поверхность равновесных состояний в пространстве выходов, которую можно изобразить как многозначную функцию входов. В первом приближении можно сказать, что «катастрофа» происходит тогда, когда возникает скачкообразное изменение выходных параметров при непрерывном изменении входов.
Для того чтобы связать эти рассуждения с нашими предыдущими замечаниями о важности анализа областей притяжения, заметим, что переход от одной области притяжения к области притяжения другого устойчивого состояния можно изобразить, как это показано на рис.8.6.
Точка x вначале принадлежит области притяжения состояния. Вследствие изменений динамики системы область притяжения Р сужается с I до II, а область притяжения Q расширяется с 1 до 2 . Теперь точка Х притягивается к Q, а не к P. Конечно, положения P и Q сами зависят от структуры системы, поэтому объекты, изображенные на этом рис. точками, по существу, являются областями, содержащими P и Q, но для нас важно лишь то, что область Р и Q отделены друг от друга. следовательно, возмущения в структуре системы, приводящие к изображенной выше ситуации порождают разрывы непрерывности в выходах, если наблюдаемые выходы оказываются равновесными состояниями.
Рис.8.6 — Смещение областей притяжения
В заключение коснемся кратко понятия «адаптивности». Признано (в особенности экологами), что одним из наиболее желательных свойств системы является ее способность воспринимать внешние воздействия (ожидаемые или неожиданные) без необратимых фатальных изменений в ее поведении. Иными словами, адаптируемость в некотором смысле является мерой жизнеспособности или выживаемости системы. Естественно, для формулировки этого понятия в математических терминах необходимо точно определить, какие воздействия считаются «допустимыми» и что следует понимать под «выживаемостью». Тем не менее, даже такое интуитивное описание адаптируемости показывает, что это понятие тесно связано с понятием области притяжения и со смещением этих областей под действием естественных или искусственных возмущений. Если эти возмущения перемещают данное состояние системы в область притяжения «фатального состояния», то ясно, что система не обладает свойством адаптируемости по отношению к данному классу возмущений. В противном случае она в той или иной степени обладает этим свойством.