Системный анализ, как и политика, — это прежде всего искусство действовать в пределах «возможного». Рассматривая математическую формулировку той или иной задачи, исследователь (или лицо, принимающее решение) должен полностью представлять себе те внутренние и внешние факторы, которые могут ограничить его выбор стратегий управления. Различные обстоятельства, связанные с объемом имеющихся ресурсов, способом, который необходимо удовлетворить, имеющейся технологией, наличием и возможностями ЭВМ, людскими ресурсами, бюджетом времени и т.д., резко сужают круг возможностей, доступных исследователю.
Выделим два принципиально различных типа ограничений:
1. внутренние — ограничения, налагаемые структурой самой системы,
2. внешние — ограничения, налагаемые на поведение системы внешними факторами.
Рассмотрим эти ограничения несколько подробнее.
Внутренние ограничения возникают вследствие определенной ограниченности возможностей измерять характеристики состояния системы и управлять течением процесса, т.е. они ограничивают взаимодействие системы с внешним миром. Вообще говоря, ограничения этого типа наиболее четко видны тогда, когда для внутреннего описания используют дифференциальные или разностные уравнения. Для иллюстрации понятия «внутренние ограничения» рассмотрим пример из области биомедицины.
Фармакокинетика. Предположим, что пациент, страдающий заболеванием сердца, получает дигитоксин, который в результате процесса обмена веществ превращается в дигоксин. Поскольку последний имеет возможность накапливаться в организме, что в результате может привести к летальному исходу, то очень важно уметь точно определять его содержание в организме прежде чем пациент примет очередную порцию дигитоксина.
Многокомпонентная модель, используемая для описания кинетики и превращений дигитоксина, изображена на рис.6.1.
Обычно принято считать, что если в организм вводится некоторая доза дигитоксина, то примерно 92% этой дозы немедленно разносится по организму и около 85% от оставшихся 8% сразу превращается в дигоксин. Предполагается, что динамика концентрации лекарств X и Y может быть описана следующим образом:
Рис.6.1 — Многокомпонентная структура процесса обмена веществ.
Здесь Х — содержание дитоксина в организме, Y — содержание дигоксина, S1 и S2 — мочевые выделения, S3 и S4 — немочевые выделения, ki — коэффициенты диффузии, i = 1,2,3,4,5.
Предположим, что можно измерить содержание дигитоксина и дигоксина только в мочевых выделениях. Тогда выход системы имеет вид y1(t) = S1(t), y2(t) = S2(t).
Именно это весьма реалистическое с практической точки зрения ограничение и является тем, что называется внутренним ограничением системы. В силу этого ограничения не все внутренние переменные системы доступны для непосредственного измерения. Имея в виду основную задачу, стоящую перед врачом, необходимо знать, достаточны ли измерения переменных y1 и y2 для определения неизвестной начальной дозы лекарства D. Эта задача является так называемой задачей наблюдаемости, обсуждение которой выходит за рамки настоящего примера.
Внешние ограничения имеют качественно иной характер. Как отмечалось выше, они обусловлены не физическими или структурными ограничениями самого процесса, а «произволом» лица, принимающего решения, которое является «внешним» по отношению к системе. Вообще говоря, эти ограничения связаны с такими обстоятельствами, как ограниченность имеющихся ресурсов и производственных мощностей, наличие заданного спроса и т.д.
Существенным моментом здесь является то, что эти ограничения налагаются извне и не имеют никакого отношения к математическим ограничениям, содержащимся в самой модели. Типичные примеры внешних ограничений содержатся в задачах экономического управления, где требуется определить соответствующее распределение фиксированных финансовых средств для достижения определенных целей. Возьмем, к примеру, сотрудника некоторой компании, ответственного за рекламу ее продукции, причем бюджет, который компания выделила на рекламные цели, составляем М $. Это значит, что он может истратить М $. на размещение рекламных объявлений, скажем, в газетах, журналах, на телевидении, радио и рекламных афишах. Предположим, что вложение xi $ в i-тый способ рекламы (i — газеты, журналы и т.д.) приводит к сбыту партии объема fi(xi) , причем функции fi(.) считаются известными. Поскольку компания заинтересована в максимизации сбыта, рекламодатель сталкивается с решением задачи максимизации fi(xi)по всем распределениям {xгаз, xжурн, xрад, xтв, xаф} при внешнем ограничении
∑xi ≤ M
Следовательно, внешнее ограничение возникло из-за ограниченности бюджета, а не из-за образа взаимодействия системы с внешним миром.
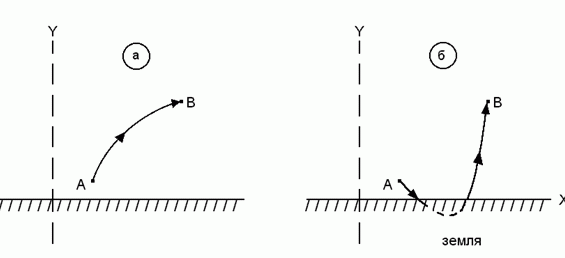
В качестве другого примера внешнего ограничения рассмотрим задачу о пилоте, которому необходимо пролететь из пункта А в пункт В за минимальное время. В зависимости от характеристик самолета и других предположений, математическое решение этой задачи может привести к оптимальной траектории, показанной на рис.6.2 б). Очевидно, что такое решение не учитывает реальных ограничений, имеющихся в этой ситуации, которые должны быть наложены извне с тем, чтобы сделать задачу осмысленной с физической точки зрения. Надлежащее внешнее ограничение (y > 0) привело бы только к оптимальной траектории, представленной на рис.6.2 а).
Рис.6.2 — Траектория полета самолета.
Одна из наиболее злободневных проблем анализа систем, рассматриваемых в сициально-экономических задачах, — это проблема выбора критерия, т.е. вопрос о том, каким образом следует сравнивать между собой различные реализации поведения систем. К счастью, динамические процессы, наблюдаемые в физических и биологических системах, часто протекают по вполне определенным законам, которые, как правило, являются следствием различных принципов минимума или законами сохранения. Однако перенос этих законов на объекты социальной природы в лучшем случае носит искусственных характер и, более того, часто просто невозможен. Поскольку цель нашего курса состоит в изучении структуры систем независимо от вопросов оптимизации, можно позволить себе роскошь оставить в стороне проблему выбора критерия. Тем не менее, для того, чтобы продемонстрировать значимость этой проблемы, рассмотрим простой пример, иллюстрирующий ситуацию, когда выбор различных критериев приводит к качественно различным стратегиям управления.
Предположим, что динамика системы описывается одномерным линейным дифференциальным уравнением dx/dt = u(t), x(0) = c, где u(t) — вход, или функция управления. Предположим, далее, что доступные резервы управления ограничены следующим образом:
|u(t)| ≤ 1 для всех 1 t ≥ 0
(Подобная ситуация возникает, например, при управлении автомобилем, и тогда функция u(t) есть скорость движения.)
Одним из критериев для данного процесса может быть перевод системы из начального состояния с в некоторое заданное состояние, например, x = 0 за минимальное время. Хорошо известно, что решение этой задачи имеет вид:
u(t) = +1, c < 0, u(t) = -1, c > 0
т.е. релейное управление является оптимальным. Предположим теперь, что мы стремимся минимизировать квадратичный функционал этого вида вида. Можно показать, что в этом случае оптимальный закон управления имеет вид
u(t) = th(T-t)⋅x(t),
и он может быть реализован в виде обратной связи или синтеза.
Полученные результаты показывают, что изменение критерия качественно меняет характер решения. В первом случае мы имеем экстремальные управления, переключающиеся с одной границы на другую в зависимости от начального состояния. Во втором случае оптимальный закон управления строится по ходу развития самого процесса и не имеет никаких точек разрыва. Важно отметить, что, хотя динамика системы остается неизменной, выбор иного критерия приводит к качественному изменению оптимального управления.